На Xiaomi не работает GPS
Функция GPS-навигации сейчас есть в каждом современном смартфоне. Большинству людей эта технология нужна практически ежедневно. К примеру, водители, у которых нет автомобильных навигаторов, часто в качестве портативного навигатора используют свой мобильный гаджет. Так как эти устройства не рассчитаны быть полноценными навигаторами, в их работе иногда бывают сбои.
Зачастую это связано с неправильными программными настройками. У многих не работает gps на Xiaomi устройствах, а именно показывает некорректное местонахождение. Существует несколько способов, которые заставят ваше устройство искать спутники быстрее.
Содержание
- Тестируем подключение
- Даем доступ нужному приложению
- Изменяем системные настройки
- Возможные проблемы с MiKey
- Проверяем контакты gps антенны
Тестируем подключение
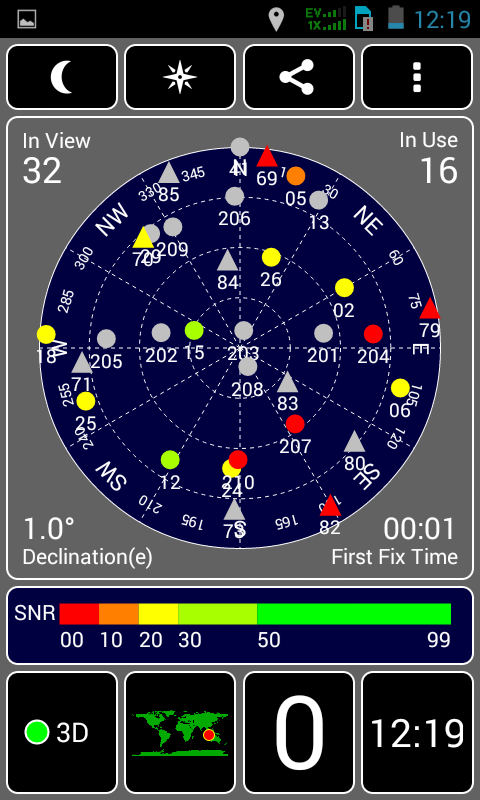
Чтобы сравнивать результаты ваших манипуляций с устройством, рекомендуем использовать программу GPS Test. Она покажет вам сколько спутников видит ваш телефон, к каким он подключен и качество этого подключения.
Она покажет вам сколько спутников видит ваш телефон, к каким он подключен и качество этого подключения.
Gps Status — отображает статус GPS, включен ли он сейчас или нет. Каждый столбик — это спутник, который видит ваш телефон, суммарное их количество можно посмотреть в верхнем левом углу «In View», в правом верхнем углу «In Use» — какое количество из них использует телефон. Цвет и цифра столбца отображает качество подключения.
- Столбец серый — спутник не используется
- от 0 до 20 (красный, оранжевый) — плохая связь
- от 20 до 40 (желтый) — приемлемое качество
- от 40 (зеленый) — отличное качество
В программе вы найдете еще множество полезных функций, таких как карта спутников, компас, точность и прочее.
GPS Test
Developer: Chartcross Limited
Price: Free
Даем доступ нужному приложению
Необходимо зайти в Настройки, далее:
- Дополнительно;
- Батарея и производительность;
- Фоновый режим;
- Приложения.
Выбираем требуемое приложения, которое работает с GPS модулем некорректно. Даём нужной программе полный доступ и снимаем все ограничения.
Изменяем системные настройки
Есть ряд пользователей, у которых смартфон находит много спутников, однако отображает неверную точку позиционирования, работает плохо и медленно. Здесь версия прошивки не играет никакой роли. К примеру, на аппарате Xiaomi Mi5 наблюдались проблемы с GPS на большинстве прошивок как кастомных, так и стоковых. Проблема решается внесением изменений в системный файл.
Для того чтобы вносить изменения в систему, необходимо получить Root права.
- Скачиваем любой проводник. Можно ES проводник или Root Explorer.
- Заходим в папку system/etc. Там ищем файл с названием gps.config.
- Рекомендуем заранее скопировать данный файл. После внесённых изменений навигация может совсем перестать работать, поэтому запасная копия может пригодиться.
- Открываем файл через встроенный текстовый редактор, переходим в конец файла и дописываем с новой строки следующее:
#Russia
NTP_SERVER=ru.
pool.ntp.org
- Сохраняем изменения, перезагружаем смартфон.
- Для полной уверенности можно еще сделать сброс кэша.
Этот метод был успешно протестирован также на аппарате xiaomi mi4 и нескольких других андроид-устройствах. После внесения изменений в системный файл, смартфон нашёл местоположение точно, с погрешностью всего 2 метра.
Возможные проблемы с MiKey
Довольно банальное решение проблемы, связанное со специальной кнопкой MiKey. Пользователи устройств xiaomi redmi note 3 pro заметили, что gps не работает, когда в телефон вставлена дополнительная кнопка MiKey в разъем для подключения наушников.
На самом деле, некоторые аппараты очень долго соединяются со спутниками вместе с кнопкой.
Как выяснилось, MiKey мешает нормальной работе GPS антенны, поэтому связь устанавливается медленно.
Проверяем контакты gps антенны
Если вы перепробовали все методы, но у вас до сих пор не работает gps, то нужно проверить контакты GPS антенны.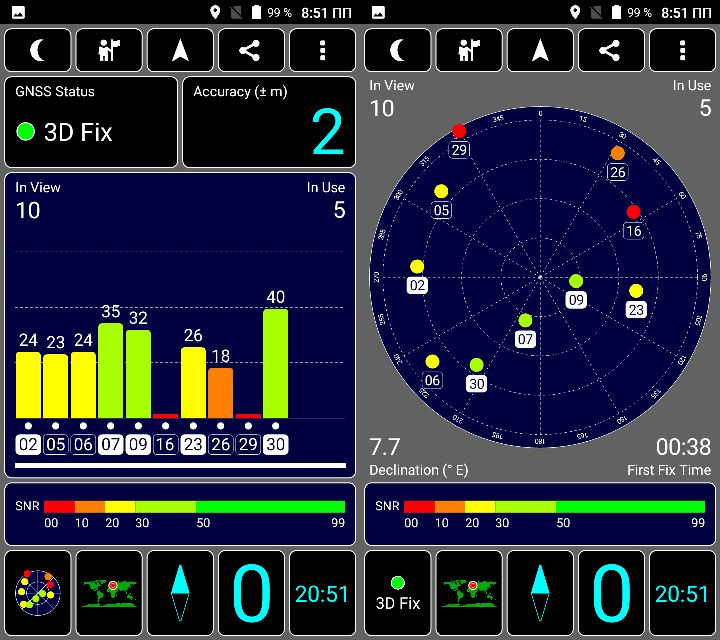
Внимание, данный способ включается в себя разбор устройства, что может стать причиной окончания гарантии. Если вы не уверены в своих силах, то не рекомендуем использовать этот способ. Все действия вы делаете на свой страх и риск.
Данную процедуру стоит делать аккуратно, чтобы не повредить системную плату.
- Снимаем заднюю крышку телефона.
- С помощью крестообразной отвёртки необходимо открутить металлическую крышку, расположенную над батареей. Снимаем её с устройства.
- На плате смартфона вы увидите несколько пружинок, которые следует зачистить миниатюрным напильником или отвёрткой. Это контакты антенны, которые соприкасаются с металлической крышкой. Если контакт плохой, то уровень сигнала будет низким, что и приводит к долгому поиску спутников.
- Точно не известно, какой из них отвечает за приём GPS сигнала, поэтому зачистите все. То же самое проделайте на металлической крышке с внутренней стороны.
- Ставим крышку на место, закручиваем болтики.
 Закрываем основную заднюю крышку и перезагружаем смартфон.
Закрываем основную заднюю крышку и перезагружаем смартфон.
Один из американских пользователей решил пойти другим путем, он отогнул контакты, чтобы они максимально плотно соприкасались с антеннами на внутренней крышке. Его фотоотчет можно увидеть чуть ниже (можно перелистывать фото).
Расположение антенн До исправления После исправленияПосле проделанных операций, наше подопытное устройство теперь ищет большее количество спутников, качество сигнала увеличилось, а соответственно точность местоположения теперь имеет минимальную погрешность.
App Store: GPS Диагностика:Satellite Test
Описание
КЛЮЧЕВАЯ ОСОБЕННОСТЬ:
— Необходимый инструмент для вашего iPhone и iPad.
— Проверьте модуль GPS.
— Быстрое время блокировки GPS.
— Точные параметры навигации.
— Дополняет работу ваших навигационных приложений.
— GPS технология «JumpStart».
— Если местоположение не может быть определено, тогда это диагностирует почему.
— Помогает вам в изменяющихся условиях, чтобы получить надежное местоположение.
— GPS, Galileo, ГЛОНАСС, QZSS полная поддержка.
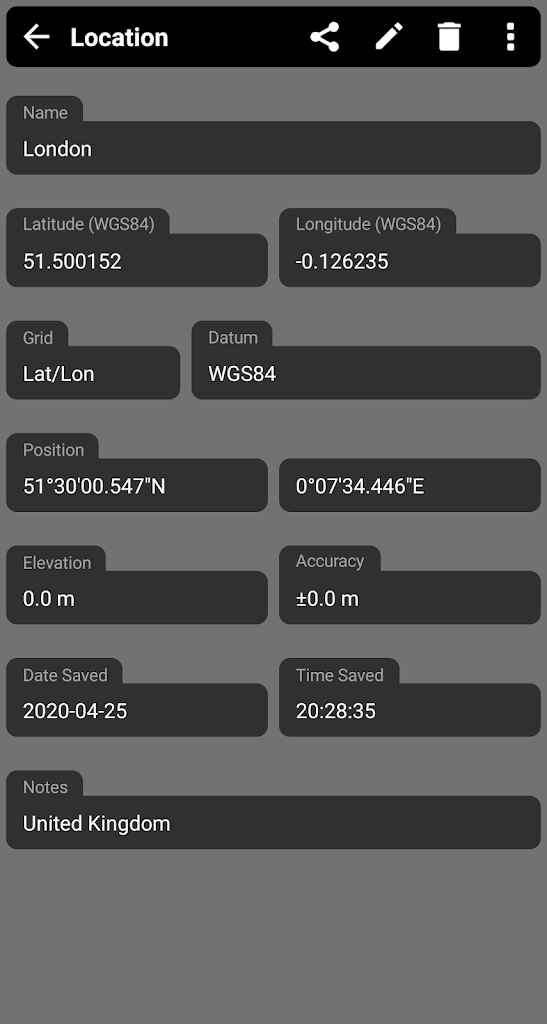
— Широта и долгота, а WGS84 включен по умолчанию.
— Бесплатная техническая поддержка по электронной почте.
————————————-
ОБЗОР:
— Спутниковая гистограмма: Инновационная разработка, которая отображает всю необходимую информацию со спутника с помощью диаграммы из 4 шкал (Copyright © 2015 David Ryall, все права защищены).
— Технология GPS «JumpStart» может решить проблемы GPS с навигационными приложениями, которые имеют замороженное местоположение, реагируют медленно или работают неточно.
— Использует встроенный GPS в iPhon или IPad.
— Место и высота над уровнем моря (лучшие в своем классе точность и надежность).
— Скорость (SOG) и курс (COG).
— Heading (т.е. компас) с возможностью включения и выключения ручной калибровки компаса.
——————————————————
Встроенные покупки = «Координаты Про» (Только английский).
Эта функция добавляет в систему дополнительные системы координат и датумы, чтобы вы могли точно работать со многими бумажными картами и диаграммами, используемыми гражданскими лицами, американскими военными и силами НАТО для ходьбы, плавания и полетов. Системы координат и датумы включены:
— США National Grid (USNG)
— Ordnance Survey National Grid (OSNG) для Великобритании,
— Universal Transverse Mercator (UTM)
— World Geographic Reference System (GEOREF)
— Global Area Reference System (GARS).
— 174 датума (например, WGS84, NAD83, NAD27, WGS72, ED50, ED79, OSGB36 и т. Д.)
——————————————————
— Информация об оборудовании
— Точность измерений, показанных для профессиональных пользователей.
— Империал, метрической и морских единиц. Это наиболее часто используемые и наиболее полезные навигационные блоки. Все легко заменяемый с экрана при использовании.
— Не требует доступа в Интернет и не использует сотовые данные.
— Необходимый инструмент для профессиональных пользователей
— Скопируйте местоположение в формате Lodestone Location для более точного определения местоположения.
(например: 37.334560 N, 122.035833 W, +/-5 metres, WGS84, Decimal Degrees).
— Работает на Lodestone Wireless algorithms © 2015.
Версия 3.6
80% reduction in file size to 35MB. Full support for latest iPad Pro 4th Generation.
Оценки и отзывы
Оценок: 38
Glonass satellites.
Russian language is fine, but could you please to extend satellites amount for the glonass satellites.
Then improve accurance, for now its +-10 meters, but with glonass it should be more accurate.
Thanks for your review. The application is fully compliant with GLONASS, if GLONASS signals are received then they are labelled as GPS on the satellite chart — this is to prevent confusion for the American market. On the next Russian version of the app I will change the labelling to indicate both GLONASS and GPS signal reception. The accuracy is determined by the internal GPS module of the iPhone and not the application. In Western Europe the best location accuracy obtainable on an iPhone is +/- 5 metres. I expect in Russia that +/- 5 metres is also possible. The application takes the best accuracy available from either GPS or GLONASS.
GPS Diagnostic
Думал придётся отдавать iPhone в ремонт, поскольку сигнал GPS практически всегда отсутствовал в течении более чем трёх месяцев. Никакие сбросы и перезагрузки не помогали. Но благодаря GPS Diagnostic, удалось реанимировать без обращения в сервисный центр.
Верните деньги
Прошу вас вернуть мне мои денежные средства так как Полностью нет соотвественного чего пишите вы. Да и сеть у меня с вами не работает и не ловит GPS
Разработчик David Ryall не сообщил Apple о своей политике конфиденциальности и используемых им способах обработки данных. Подробные сведения доступны в политике конфиденциальности разработчика.
Нет сведений
Разработчик будет обязан предоставить сведения о конфиденциальности при отправке следующего обновления приложения.
Информация
- Провайдер
- David Ryall
- Размер
- 36,1 МБ
- Категория
- Навигация
- Возраст
- 4+
- Copyright
- © 2015 David Ryall
- Цена
- 279,00 ₽
- Сайт разработчика
- Поддержка приложения
- Политика конфиденциальности
Другие приложения этого разработчика
Вам может понравиться
GPS:Нет исправления.
 …но показано исправление? (РЕШЕНО путем обновления Планировщика миссий до последней версии) — Plane 3.9
…но показано исправление? (РЕШЕНО путем обновления Планировщика миссий до последней версии) — Plane 3.9#1
FC=F405 Крыло
GPS=Hollybro Micro Mini (M8N)
Запуск ArduPlane 3.9.4.
Я пробовал UART3, UART5 и UART6. Я пробовал 115 200 и 38 400 бод. Пробовал два разных устройства GPS (оба одного типа). Все варианты имеют одинаковое поведение.
Окно искусственного горизонта показывает, что есть «GPS:Нет фиксации» или «GPS:Нет GPS». Но самолет отображается в правильном положении на карте. Его движение в пределах небольшой области (±10 м) показывает, что GPS активно обновляется и что контроллер полета получает данные.
И… если я выполню команду «включить», я сначала буду отклонен с голосовым предупреждением планировщика миссии, что «GPS NUM SATS = 5, НУЖНО 6» … пока я не получу 6-й спутник.
Однако в отображении состояния я по-прежнему вижу satcount=0 и gpsstatus2=0. Показана действительная широта и долгота.
РУБ
ямпет (Питер Холл)
#2
вы можете опубликовать свой файл параметров, спасибо
RogerR (Роджер Рональд)
#3
Файл параметров доступен по адресу: https://drive.google.com/open?id=1n-DBALFwf27Aq3MUwlY-DrTLmKZSLdyf
микрофон (Майк Келли)
#4
Существует большая разница между GPS:no fix и GPS:noGPS. Nofix означает, что вы просто не получили достаточно хорошую блокировку, но GPS работает, и Ardupilot получает данные. NOGPS означает, что он не подключен или скорость передачи данных неверна.
Ardupilot не включится, пока у вас не будет минимального количества спутников и сигнала минимального качества. Параметры, которые изменяются в списке параметров. Вам просто нужно подождать, пока он не наберет достаточно спутников. Помните, что спутники передают радиосигнал и вращаются вокруг Земли так, что постоянно «поднимаются» и заходят. Одни становятся видимыми, а другие уходят за горизонт.
Дисплей состояния может отображать два GPS, и вам необходимо убедиться, что вы смотрите на основной, а не на несуществующий дополнительный. Под HUD можно увидеть статус фактических данных GPS и откуда они поступают.
1 Нравится
РоджерР (Роджер Рональд)
#5
Я начал с новой загрузки 3.9.4.
В настоящее время на моем дисплее в HUD отображается сообщение «GPS: GPS отсутствует», но самолет отображается в своем текущем положении (он немного перемещается примерно раз в секунду).
Я понимаю, что мне нужно «n» спутников для постановки на охрану… Я описывал «GPS NUM SATS = 5, NEED 6», чтобы показать, что полетный контроллер четко видит некоторые спутники GPS… и, в конце концов, увидел достаточно для постановки на охрану.
Для параметра GPS_TYPE установлено значение 1 (АВТО), для параметра GPS_TYPE2 установлено значение 0 (Нет).
Я не уверен в отображении состояния, которое вы описываете под HUD. Если это вкладка с надписью «статус», данные в лучшем случае кажутся смешанными (количество статистических данных равно нулю, но также показывает широту и долготу). Статус под картой показывает, что это тоже… широта, долгота и высота… но текст выше показывает, что hdop равен 0,0, а Sats=0.
руб.
микрофон (Майк Келли)
#6
Вы не можете идти по положению маленького самолета на карте. Есть и другие способы, которыми Ardupilot может определить направление и т. д.
Похоже, у вас не подключен GPS, что означает неправильную скорость передачи данных, или кабель подключен неправильно, или он неисправен.
Фьерфуффциг (басти)
#7
@RogerR, поскольку у вас уже было сообщение «noFix» на экране телеметрии, вы, скорее всего, все настроили правильно, а затем изменили настройки последовательного порта на менее благоприятные значения.
MatekF405-wing будет искать GPS на SERIAL3 и 4 по умолчанию, с настройками по умолчанию, используемыми для GPS:
BAUD = 38
PROTOCOL = 5 по умолчанию, поэтому вам, вероятно, понадобится подключенная батарея, чтобы 5-вольтовые контакты ваших последовательных портов обеспечивали питание для периферийных устройств.
в ваших параметрах, указанных выше, у вас есть BAUD, установленный на 115 на вашем основном порту GPS (SERIAL 3). однако ваши последовательные порты 4, 5 и 6 имеют PROTOCOL, установленный на -1 (= нет).
я предлагаю вернуться к настройкам по умолчанию для SERIAL3 и установить
SERIAL3_BAUD = 38
SERIAL3_PROTOCOL = 5
, затем подключить GPS к последовательному порту 3 вашей платы с батареей, подключенной к вашей плате, проверьте, что у вас есть RX / TX сопряжен правильно и ищите сообщение «GPS: noFix». с хорошим приемом под открытым небом вы, скорее всего, скоро получите хорошую поправку.
ура, басти.
РоджерР (Роджер Рональд)
#8
Планировщик миссий сообщает мне, что GPS отсутствует.
И еще, когда я слишком быстро пытаюсь вооружить самолет, я слышу, что у меня всего 5 спутников. У вас не может быть 5 спутников без GPS! И если я подожду несколько минут, я смогу вооружиться. Это означает, что контроллер полета видит как минимум 6 спутников!
Устройство GPS включено (зеленый светодиод) и в конце концов начинает мигать синим светом, указывая на правильное определение местоположения. Как указано в моем первом посте, я уже пробовал Serial 3 в качестве GPS на скорости 38 (38 400 бод) с теми же результатами. Качество сигнала, подтвержденное осциллографом, на линии GPS TX отличное. Я также проверил RX GPS с помощью U-Center (я не вижу данных от FC к GPS, но я предполагаю, что после программирования GPS в этом направлении нет нормальной болтовни).
RR
Фьерфуффциг (басти)
#9
что говорит вкладка сообщений вашего депутата при подключении? есть ли какие-то строки, например:
GPS 1: обнаружен как u-blox на скорости 115200 бод
u-blox 1 HW: 00080000 SW: ... ?
Майк (Майк Келли)
#10
Под HUD в Планировщике миссий вы можете выбрать и просмотреть данные, поступающие от GPS. Проверьте и убедитесь, что вы действительно получаете данные. Когда я говорил о качестве сигнала GPS, я имел в виду принимаемый радиосигнал.
Когда Mission Planner говорит об отсутствии GPS, это означает, что он не видит сообщения GPS mavlink. Тот факт, что ваша карта также показывает hdop=0 и sats=0, также говорит мне, что планировщик миссий не видит GPS.
Эти две точки данных противоречат вашему «Я слышал, что у меня только 5 спутников», но это указывает на то, что что-то не так. Порт для маленьких F4 довольно новый, возможно, есть ошибка.
РоджерР (Роджер Рональд)
#11
Вот набор сообщений, начинающихся при включении питания (они находятся в нижней части этих сообщений):
Дроссель включен
Отказоустойчивость. Длительное событие выключено: причина = 3
Отказ дроссельной заслонки выключен
EKF2 IMU0 использует GPS
PreArm: отказоустойчивость радио включена
PreArm: AHRS не исправна
EKF2 IMU0 Origin установлен на GPS
PreArm: отказоустойчивость радио включена (требуется < 11.3)
EKF2 IMU0 выравнивание наклона завершено
EKF2 IMU0 начальное выравнивание рыскания завершено
u-blox 1 HW: 00080000 SW: EXT CORE 3. 01 (107900)
01 (107900)
Режим полета = 11
Failsafe. Длинное событие: тип=2/причина=3
MatekF405-Win 00370028 33374715 3835343
ChibiOS: ff603d11
ArduPlane V3.9.4 (7e37f2b6)
Режим полета = 1
Отказоустойчивость. Короткое событие на: тип=1/причина=3
Отказоустойчивость дроссельной заслонки на
Сообщение на HUD во время всего этого: «GPS: Нет исправления».
Я думаю, что потребовалось около 60 секунд, чтобы привести его в действие… что чертовски быстро для моего дома.
Вот еще один забег. Я нажимал ARM примерно каждые 10 секунд:
Дроссель включен
EKF2 IMU0 использует GPS
EKF2 IMU0 Origin установлен на GPS
PreArm: GPS HDOP 2.6 (необходимо 2.5)
PreArm: GPS HDOP 2.6 (необходимо 2.5)
PreArm: GPS HDOP 2.6 (необходимо 2.5)
PreArm: GPS HDOP 2.6 (необходимо 2.5)
PreArm: GPS HDOP 3.0 (необходимо 2.5)
PreArm: GPS HDOP 3.0 (необходимо 2.5)
PreArm: GPS HDOP 3.0 (необходимо 2.5)
PreArm: GPS numsats 5 (необходимо 6)
PreArm: GPS numsats 4 (необходимо 6)
PreArm: GPS numsats 4 (необходимо 6)
Выравнивание наклона EKF2 IMU0 завершено
Выравнивание начального отклонения EKF2 IMU0 завершено
PreArm: Плохое положение GPS
PREARM: EKF, начальные GPS Проверки
PREARM: Bad GPS Позиция
PREARM: EKF2 ИТ Резу.
ArduPlane V3.9.4 (7e37f2b6)
Опять же, претензия к ИЛС «GPS: No FIx». Внизу карты отображается 0 спутников и 100 HDOP.
RogerR (Роджер Рональд)
#12
Майк,
Не знаю, где вы говорите о том, что видите данные, поступающие от GPS. Я могу установить широту и долготу (оба выглядят правильно) для отображения на HUD вместе со статусом GPS (= 1) и hdop (= 99,99).
Я также могу видеть широту и долготу, статус GPS, HDOP и количество сателлитов на вкладке «Статус». Опять же, широта и долгота выглядят правильно. hdop и sat count неверны.
Почти уверен, что я могу летать в текущей ситуации, так как EKF видит GPS… несмотря на ошибочные указания на дисплеях планировщика миссии. Но что-то в Arduplane 3. 9.4 или Mission Planner кажется неправильным, если EKF говорит, что GPS работает, а Mission Planner показывает, что это не так.
9.4 или Mission Planner кажется неправильным, если EKF говорит, что GPS работает, а Mission Planner показывает, что это не так.
РоджерР (Роджер Рональд)
№13
Новые данные.
Я вытащил журналы данных со вчерашнего дня.
У меня было в среднем 16 сеансов в течение двух часов (минимум = 11, максимум = 19). Неплохо для дома. Во втором журнале (19минут), лог начался с 6 спутников (при первой постановке на охрану поднялся до 13 примерно через 2 минуты и оставался в диапазоне 13-15 в остальное время.
Статус GPS был 4 получает) все время в длинном журнале. В коротком журнале он начался с 3 и дошел до 4 примерно через минуту.
количество и статус:
Краткий журнал доступен по адресу https://drive. google.com/open?id=1hm3xj6pA_6xToOt2zt6eqQvK3qS2G2XC
google.com/open?id=1hm3xj6pA_6xToOt2zt6eqQvK3qS2G2XC
Майк (Майк Келли)
№14
Под HUD находится дисплей с данными в реальном времени, и вы можете щелкнуть правой кнопкой мыши и указать, что хотите видеть, я не говорю о вкладке сообщений.
Но ваш журнал выглядит так, как будто вы получаете данные GPS. Однако я был бы очень осторожен, потому что, когда полетный контроллер летит в любом режиме с помощью fc, и он сбивается, он может унести ваш самолет куда угодно, не спрашивая вашего разрешения 🙂
РоджерР (Роджер Рональд)
№15
Вчера я совершил три полета. Использовался автовзлет для этой «передевицы». Все отлично работало в режимах FBWA и auto.
Использовался автовзлет для этой «передевицы». Все отлично работало в режимах FBWA и auto.
Я подозреваю, что что-то мешает нормальному дополнению GPS-телеметрии передаваться через serial0 (порт USB). Я посмотрю, смогу ли я подключить радиотелеметрию, чтобы определить, возникает ли отсутствие надлежащего статуса GPS в Планировщике миссий и на других UART.
РУБ
РоджерР (Роджер Рональд)
№16
Обновление. Я добавил радио SIK на порт Telem1. Он общается с моим компьютером по этой ссылке. USB не подключен. Все еще есть та же проблема… GPS работает нормально, но планировщик миссий указывает, что у него нет исправления, и показывает неправильное количество спутников (0) и hdop (100).
.
.
Обратите внимание, что HUD показывает широту и долготу (как и вид карты). Но HUD hdop неправильный, как и карта hdop и количество сат. Карта также показывает положение, включая высоту. HUD показывает «GPS:Нет исправления», но иногда показывает «GPS:Нет GPS».
ВикедШелл (Злая оболочка)
# 17
FWIW Недавно у меня была эта проблема с MP, и это была просто специфичная ошибка MP при отображении данных, изменение версий MP решило ее (или использование других GCS, что я обычно делаю в любом случае). Однако рядом со мной нет компьютера, на котором возникла проблема.
РоджерР (Роджер Рональд)
# 18
WickedShell
Спасибо за ответ. Эта проблема была вызвана версией MIssion Planner. У меня была версия 1.3.52, и моя проблема проявилась на двух компьютерах с этой версией…
По какой-то причине мой MP не пытался обновиться. Кнопки на экране справки для проверки обновлений (и бета-обновлений) не работали. Пришлось удалить старую версию и установить заново. Предпринял несколько попыток, но в конце концов мне это удалось.
Последняя версия MP (1.3.62) отлично работает, и теперь моя проблема решена. Спасибо еще раз!
руб.
1 Нравится
Кенни222 (КенниМартин)
# 19
Надеюсь, кто-нибудь поможет мне решить мою проблему.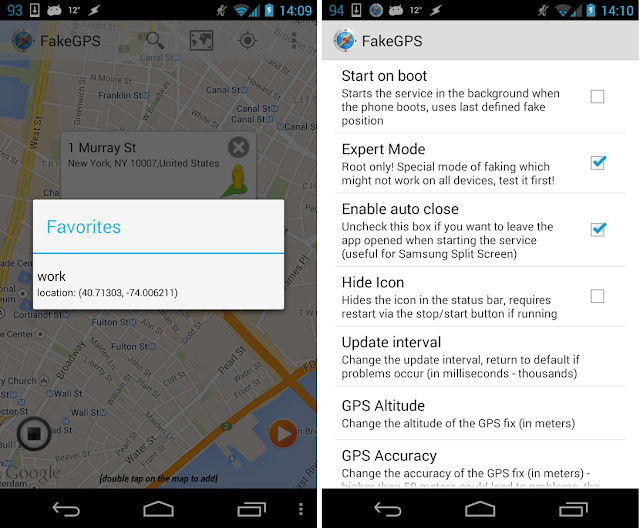
У меня мало опыта работы с arduplane/MPlanner.
Я купил плату F405-wse и прошил ее последней стабильной прошивкой arduplane bl.
Подключил его к MP, и все работает нормально, ЗА ИСКЛЮЧЕНИЕМ того, что мой GPS не работает должным образом.
Я получаю стартовое сообщение на экране OSD:
GPS 1: GPS ОБНАРУЖЕН КАК UBLOX НА 115200 БОД
Сначала я прошил плату с помощью inav, и все работало нормально, включая GPS.
Я использовал запасной кабель GPS, который шел в комплекте с платой, для подключения стороннего GPS к боковому порту (Uart4) платы.
Именно сюда inav в инструкции рекомендовали подключить оригинальный матек gps.
Правильно ли я говорю, что мне нужно подключить GPS к UART 3 (rx3/rx3) вместо rX4/tx4?
Я также пытался изменить скорость передачи данных последовательного порта 3 GPS в списке стандартных параметров, но это не имело никакого значения.
Спасибо.
Обновление:
Решение состоит в том, чтобы установить для SERIAL3_PROTOCOL значение -1, чтобы GPS затем находился в SERIAL4.
Танапонг_Фантонг (Танапонг Пантхонг)
#20
Большое спасибо, @mike
Почему мой новый MFD/GPS дает неточные данные GPS или теряет данные GPS?
Несмотря на то, что приемники GPS и GNSS значительно более чувствительны и надежны, чем когда-либо прежде, мы по-прежнему получаем вопросы о потере определения местоположения или низкой точности. Этот часто задаваемый вопрос направлен на то, чтобы помочь определить некоторые из потенциальных причин и то, как вы можете их идентифицировать. Типичная точность фиксации с современной внешней антенной при ясном обзоре неба составляет погрешность <0,5 м, даже без дифференциала.
Системы GNSS, включая GPS, работают на основе измерений времени прохождения сигнала от спутников с известным положением в небе и очень точными атомными часами до вашего приемника GNSS. Даже в идеальном случае необходимо как минимум 4 спутника. Каждый расчет GNSS имеет фактор ошибки, который возникает из-за таких вещей, как дрейф часов на спутниках, искажения на пути сигнала через атмосферу и разрешение измерения времени в приемнике, поэтому никакое определение местоположения GNSS никогда не бывает идеальным. С лучшей технологией вы получаете меньшие ошибки, вот и все.
Даже в идеальном случае необходимо как минимум 4 спутника. Каждый расчет GNSS имеет фактор ошибки, который возникает из-за таких вещей, как дрейф часов на спутниках, искажения на пути сигнала через атмосферу и разрешение измерения времени в приемнике, поэтому никакое определение местоположения GNSS никогда не бывает идеальным. С лучшей технологией вы получаете меньшие ошибки, вот и все.
Сигналы, которые должен уловить GNSS-приемник, очень слабые: они передаются с мощностью около 25 Вт с высоты около 20 000 км, а мощность сигнала на поверхности составляет около 0,00000000000000001 Вт, поэтому для блокировки не требуется много времени. или мешать сигналам.
Наряду с требованием достаточного уровня сигнала по крайней мере от 4 спутников важно распределение этих спутников в небе. Как любой, кто наносил свое положение по азимуту на бумажную карту, знает или сможет сказать вам, что если все ваши азимуты находятся примерно в одном направлении, точность вашего графика будет очень низкой. Что вам нужно, чтобы получить точный график, так это спутники, которые хорошо разнесены в разных направлениях и высотах от вашего местоположения. Это не похоже на прием FM-радио или телефона, где направление не имеет значения: в GNSS большое значение имеет направление передатчиков.
Что вам нужно, чтобы получить точный график, так это спутники, которые хорошо разнесены в разных направлениях и высотах от вашего местоположения. Это не похоже на прием FM-радио или телефона, где направление не имеет значения: в GNSS большое значение имеет направление передатчиков.
Это изображение иллюстрирует это: (A) представляет собой идеальный (нереалистичный) случай, (B) показывает размер зоны точности определения местоположения (снижение точности, DOP) для спутников, которые хорошо разнесены, и нормальная доза ошибки синхронизации , а большая зеленая зона на ( C ) показывает, что происходит, когда вы пытаетесь вычислить фиксацию по спутникам, которые находятся близко друг к другу в небе:
Если судно не движется, почему моя фиксация положения приходит и уходит ?
Спутники GNSS не являются фиксированными (геостационарными), диапазон спутников, находящихся в поле зрения, меняется в течение дня: новые появляются из-за горизонта, а другие исчезают из поля зрения. Уровни спутникового сигнала изменятся с одного момента из-за изменения пути сигнала через атмосферу. Нормальное движение лодки может создать препятствия (осветительная мачта, спутниковое телевидение, радар, мачты, береговые конструкции…) между определенными спутниками и вашим приемником. Уровни фонового шума на вашей лодке (шум присутствует всегда, см. ниже) будут меняться при запуске и остановке систем, при изменении нагрузки, температуры или напряжения питания.
Уровни спутникового сигнала изменятся с одного момента из-за изменения пути сигнала через атмосферу. Нормальное движение лодки может создать препятствия (осветительная мачта, спутниковое телевидение, радар, мачты, береговые конструкции…) между определенными спутниками и вашим приемником. Уровни фонового шума на вашей лодке (шум присутствует всегда, см. ниже) будут меняться при запуске и остановке систем, при изменении нагрузки, температуры или напряжения питания.
По всем этим и другим причинам качество вашей GNSS-фиксации будет постоянно меняться. Если он в основном находится чуть выше порога исправления/отсутствия исправления, но иногда опускается ниже (или зависит от спутника, который опускается ниже горизонта или проходит за препятствием), вы будете получать периодические сигналы тревоги «Потерянное исправление».
Расположение антенны и обзор неба
Раньше каждая система GPS использовала внешнюю антенну, установленную снаружи, но в настоящее время возможно и обычное дело, когда приемник находится внутри навигационного дисплея и, следовательно, может располагаться под палубой или в каюте. где это как гораздо менее хороший вид на небо. Как упоминалось выше, приемник GNSS должен иметь хороший обзор вокруг, а не только в определенных направлениях (из окна?), чтобы получить надежное местонахождение. Если, например, он установлен в алюминиевой приборной панели или под жестким верхом из сплава, то он может хорошо зафиксироваться в определенное время дня, но не тогда, когда движутся спутники или когда вы поворачиваете лодку, чтобы вернуться домой.
где это как гораздо менее хороший вид на небо. Как упоминалось выше, приемник GNSS должен иметь хороший обзор вокруг, а не только в определенных направлениях (из окна?), чтобы получить надежное местонахождение. Если, например, он установлен в алюминиевой приборной панели или под жестким верхом из сплава, то он может хорошо зафиксироваться в определенное время дня, но не тогда, когда движутся спутники или когда вы поворачиваете лодку, чтобы вернуться домой.
Токопроводящие поверхности (сталь, алюминий, углерод) больше всего блокируют сигнал, но, учитывая чрезвычайно низкий уровень сигнала, даже стекловолокна или мокрого от дождя бимини может быть достаточно, чтобы вызвать проблемы.
Плохой вид неба даст очень неравномерное определение: вы можете получить точное определение в одну минуту, очень неточное или не исправить в следующую. На этом снимке экрана показан дрейф в определениях местоположения GNSS с течением времени в системе, которая работает отлично, но имеет (преднамеренно) очень плохой обзор неба. В этом тесте у нас был приемник в помещении близко к окну, чтобы имитировать установку на приборной панели под легкосплавным жестким верхом. Обратите внимание на максимальный и текущий SOG:
В этом тесте у нас был приемник в помещении близко к окну, чтобы имитировать установку на приборной панели под легкосплавным жестким верхом. Обратите внимание на максимальный и текущий SOG:
Если вы сомневаетесь, подумайте о том, чтобы установить внешнюю GPS-антенну где-нибудь на улице с хорошим обзором неба. Это может быть антенна NMEA2000 (RS150 или AR200, на момент написания) или некоторые дисплеи (сегодня Axiom Pro или Axiom XL MFD) имеют подключение для внешней пассивной антенны GPS (GA150) для усиления сигнала внутренней получатель. Оба обеспечивают одинаковую производительность, но GA150 дешевле, если ваш дисплей поддерживает его.
Погодные и атмосферные условия, состояние моря и движение судов
Плохая погода ослабляет и прерывает прием сигналов от спутников GNSS, что может привести к значительному падению точности определения координат. Были несчастные случаи со смертельным исходом, отчасти связанные с чрезмерным доверием к GPS/GNSS в такое время (здесь, в Австралии, например, приостановка работы PriceWaterhouseCoopers в 2009 году), поэтому никогда не воспринимайте свое положение GNSS как гарантированное. Точность вашего местоположения всегда будет хуже в плохих условиях, и это может быть неочевидно в данный момент.
Точность вашего местоположения всегда будет хуже в плохих условиях, и это может быть неочевидно в данный момент.
Выбран/используется неправильный приемник GNSS
Современные системы обычно имеют несколько приемников GNSS: например, у вас может быть внешняя антенна NMEA2000 на крыше, внутренние антенны в MFD, еще одна в вашем VHF и еще одна в приемопередатчике AIS. Распространенной причиной жалоб на низкую производительность является использование неправильного GPS. Если у вас есть несколько приемников GNSS, мы обычно рекомендуем вам вручную выбрать тот, у которого наиболее чувствительная и наиболее удачно расположенная антенна, в качестве основного системного источника в выборе источника данных вашего MFD. Известно, что некоторые приемопередатчики AIS сторонних производителей «вступают во владение», например, когда для выбора источника GPS установлено значение «Авто».
Чтобы проверить/изменить выбранный источник:
Lighthouse 2: на главном МФД выберите «Главная» > «Настройка» > «Системные настройки» > «Источники данных» > «GPS
».
Маяк 3: На главном МФД выберите «Главная» > «Настройки» > «Сеть» > «Источники данных» > «GPS
».
Если вы сомневаетесь, выберите источник с наибольшей точностью.
Вы также можете увидеть, какой источник GPS используется, посмотрев на странице состояния GPS:
Lighthouse 2: Home > Setup > System Settings > GPS Setup > View Satellite Status, посмотрите на темно-синюю строку заголовка
Lighthouse 3: Home > GPS position (верхний левый угол) > Satellites, посмотрите на темно-серую информационную панель под «Fix» и «Settings», непосредственно под словом «Satellites» и выше «HDOP»
Дифференциальный режим включается вне зоны покрытия
В мире существует ряд спутниковых дифференциальных систем (SBAS) для повышения точности определения местоположения, которые охватывают многих пользователей Raymarine:
В зонах вне зоны покрытия Однако из этих различных систем SBAS вы можете получить менее точное определение местоположения с помощью дифференциального GPS, чем при использовании стандартного режима определения местоположения. Например, в Австралии и Новой Зеландии вы можете обнаружить второстепенные значения японского MSAS, индийского GAGAN или американского WAAS, и тогда ваше исправление будет менее точным. Обычно происходит то, что исправление переключается между низкой и высокой точностью по мере того, как система получает и теряет предельный дифференциальный сигнал с течением времени. В этих регионах мы рекомендуем отключать дифференциальный режим.
Например, в Австралии и Новой Зеландии вы можете обнаружить второстепенные значения японского MSAS, индийского GAGAN или американского WAAS, и тогда ваше исправление будет менее точным. Обычно происходит то, что исправление переключается между низкой и высокой точностью по мере того, как система получает и теряет предельный дифференциальный сигнал с течением времени. В этих регионах мы рекомендуем отключать дифференциальный режим.
Дифференциал включен, в Новой Зеландии и синхронизирован с американскими спутниками WAAS 131 и 133:
И та же система с дифференциальным выключением:
Присоединенные / повторно подключенные кабели пассивной антенны (например, GA150)
, Никогда когда-либо обрезать, соединять или переделывать кабель пассивной антенны. Уровни мощности слишком низки, а вероятные потери при соединении слишком велики. Мы не предоставляем никаких гарантий или поддержки, если вы или ваш установщик повторно подсоединили кабель пассивной антенны GPS.
Радиочастотные помехи (шум)
Поскольку мощность сигнала GNSS настолько мала, не требуется большого количества радиочастотного шума, чтобы вызвать проблему. Это распространенное заблуждение, что только радиоприемники и другие «преднамеренные передатчики» могут создавать помехи, но это не так. Любое электрическое или электронное устройство, работающее на определенной частоте и не являющееся полностью устойчивым (то есть почти все на лодке, кроме лампы накаливания), потенциально может быть источником шума. Насосы, двигатели и компрессоры являются распространенными причинами шума на более низких частотах, например, но в высокочастотных диапазонах GNSS наиболее распространенными источниками, которые мы видели, являются:
Драйверы светодиодного освещения (не сами светодиоды, а их импульсные источники питания (SMPS), см. уведомление Береговой охраны США, ссылка на которое приведена в разделе «Справочные материалы» ниже, которое относится к УКВ, но применимо и к GPS/GNSS)
Зарядные устройства USB, розетки 5 В и USB-устройства
наземные телевизионные антенны
зарядные устройства, контроллеры заряда от солнечной или ветровой энергии, инверторы и другие решения для зарядки и питания
Радиостанции УКВ
радар, если антенна GNSS находится на одном уровне с радаром и в пределах его луча
Из них наиболее распространенным является светодиодное освещение, на втором месте — USB-устройства.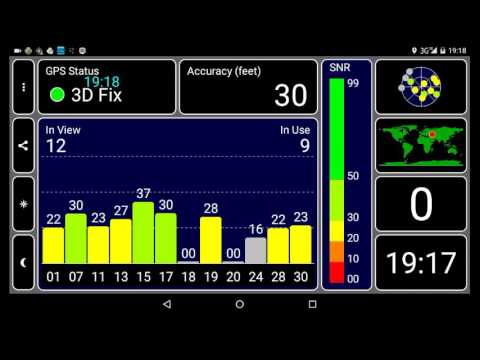 В качестве примера, вот кривая на анализаторе спектра частоты GPS L1 (1575,42 МГц) при подключении и отключении проблемного USB с помощью зарядного устройства. Это устройство производит достаточный радиочастотный шум, чтобы заглушить все приемники GPS в радиусе нескольких метров, но в остальном работает нормально:
В качестве примера, вот кривая на анализаторе спектра частоты GPS L1 (1575,42 МГц) при подключении и отключении проблемного USB с помощью зарядного устройства. Это устройство производит достаточный радиочастотный шум, чтобы заглушить все приемники GPS в радиусе нескольких метров, но в остальном работает нормально:
Сначала проверьте следующие позиции:
Если у вас вообще нет информации об источнике/фиксации GPS, включена ли ваша внешняя антенна? Что показывает его светодиодный индикатор состояния? Все предохранители включены? (на RS150 или AR200, если светодиод горит красным, у вас серьезная проблема с питанием!)
Убедитесь, что текущий источник GPS является правильным (см. Выбран/используется неправильный приемник GNSS выше)
Убедитесь, что если вы находитесь за пределами региона, охваченного активной дифференциальной службой SBAS, дифференциальный режим отключен (см. раздел Дифференциальный режим, когда он находится за пределами охваченного региона)
Если вы уверены, что выбрали правильный источник GPS и что он обеспечивает хороший обзор неба, вам необходимо посмотреть на видимые спутники и уровни сигнала на странице состояния GPS вашего МФД (см. раздел Неправильный приемник GNSS). выбран/используется.) Вы, вероятно, увидите одну из следующих вещей:
раздел Неправильный приемник GNSS). выбран/используется.) Вы, вероятно, увидите одну из следующих вещей:
Слабые уровни спутникового сигнала по всему периметру и очень мало спутников в поле зрения или чередование хороших и слабых уровней сигнала. Это признак вероятных радиочастотных помех (постоянных или периодических).
Хорошие уровни спутникового сигнала на спутниках в одних частях неба, слабые в других. Это означает, что у антенны плохой обзор неба, и вам нужно увидеть, что блокирует обзор, и подумать о перемещении антенны или препятствия.
Вот пример плохого обзора неба. Мы видим, что уровни спутникового сигнала хорошие на юго-востоке и плохие на северо-западе. Это была тестовая система в нашем окне службы поддержки, которая выглядит как SE. См. высокий HDOP и низкую точность:
Если вы не уверены, что происходит
Сделайте фотографии или видео, если это необходимо, содержимого страницы состояния спутников GPS и разместите их в вопросе здесь, на форуме. Мы можем сказать вам, в чем проблема. Почти наверняка это не аппаратная неисправность приемника GNSS, потому что сейчас они такие чувствительные и надежные.
Мы можем сказать вам, в чем проблема. Почти наверняка это не аппаратная неисправность приемника GNSS, потому что сейчас они такие чувствительные и надежные.
Другие известные проблемы и замечания
Картплоттеры Seatalk1 не отображают информацию о состоянии спутников через преобразователь Seatalk1-SeatalkNG (деталь E22158): преобразователь не передает этот уровень детализации в старый ST1
Datum: в современных системах следует использовать только WGS-84. Все современные карты используют WGS-84. Если у вас есть постоянная ошибка в вашем GPS-положении, вы, вероятно, неправильно установили датум.
Если у вас есть ошибка местоположения, которая возникает только в определенном месте, то либо есть локальные помехи (например, от береговой установки), либо у вас есть ошибка в данных вашей карты в этом месте. Если ошибка постоянна по количеству и направлению (например, вы всегда отображаете 50 м к северу от того места, которое, как вы знаете, является правильным) только в одной области, тогда это будет ошибка карты, и вы должны обновить свою карту или сообщить о проблеме на свою карту.