
Конвертер величин / Калькулятор единиц измерения
Изначальное значение:
Калькулятуру классических единиц измерения:
Категории измерений:Активность катализатораБайт / Битвес ткани (текстиль)ВремяВыбросы CO2Громкость звукаДавлениеДинамическая вязкостьДлина / РасстояниеЁмкостьИмпульсИндуктивностьИнтенсивность светаКинематическая вязкостьКоличество веществаКулинария / РецептыМагнитный потокмагнитодвижущая силаМасса / ВесМассовый расходМолярная концентрацияМолярная массаМолярный объемМомент импульсаМомент силыМощностьМощностью эквивалентной дозыМузыкальный интервалНапряжённость магнитного поляНефтяной эквивалентОбъёмОбъёмный расход жидкостиОсвещенностьПлоский уголПлотностьПлотность магнитного потокаПлощадьПоверхностное натяжениеПоглощённая дозаПриставки СИпроизведение дозы на длинупроизведения дозы на площадьПроизводительность компьютера (флопс)Производительность компьютера (IPS)РадиоактивностьРазмер шрифта (CSS)Световая энергияСветовой потокСилаСистемы исчисленияСкоростьСкорость вращенияСкорость передачи данныхТекстильные измеренияТелесный уголТемператураУскорениеЧастей в .
Изначальное значение:
Изначальная единица измерения:Ангстрем [Å]Астрономическая единица [AU]аттометр [ам]гектометр [гм]Гигаметр [Гм]декаметр [дам]дециметр [дм]Дюйм [in]Икс-единица — СигбанКабельтовКвартеркилометр [км]ЛинкЛокоть (британский)Мегаметр [Мм]Метр [м]Метрическая милямикрометр [мкм]миллиметр [мм]Миль — тыcячМиля (международная) [mi]Миля (США)Морская миляМорская саженьнанометр [нм]Парсек [pc]Перчпикометр [пм]Планковская длинаПольРимская миляРодсантиметр [см]Световые годыСветовые дниСветовые минутыСветовые секундыСветовые часыСтатутная миляТвипфемтометр [фм]ФурлонгФут [ft]Чейн [ch]Ярд
Требуемая единица измерения:Ангстрем [Å]Астрономическая единица [AU]аттометр [ам]гектометр [гм]Гигаметр [Гм]декаметр [дам]дециметр [дм]Дюйм [in]Икс-единица — СигбанКабельтовКвартеркилометр [км]ЛинкЛокоть (британский)Мегаметр [Мм]Метр [м]Метрическая милямикрометр [мкм]миллиметр [мм]Миль — тыcячМиля (международная) [mi]Миля (США)Морская миляМорская саженьнанометр [нм]Парсек [pc]Перчпикометр [пм]Планковская длинаПольРимская миляРодсантиметр [см]Световые годыСветовые дниСветовые минутыСветовые секундыСветовые часыСтатутная миляТвипфемтометр [фм]ФурлонгФут [ft]Чейн [ch]Ярд
Перевод единиц измерения никак нельзя назвать банальной задачей:
Миллиметр, сантиметр, дециметр, метр, километр, миля, морская миля, фут, ярд, дюйм, локоть, парсек и световой год.

Калькулятор-конвертор для единиц измерения. Способен преобразовать огромное количество единиц измерения.
Изучаем ультразвуковой датчик Lego mindstorms EV3
Содержание урока Введение: 7.1. Изучаем ультразвуковой датчик 7.2. Робот-полицейский 7.3. Ультразвуковой датчик — режим «Присутствие/слушать»
Введение:
Текущий урок мы посвятим изучению ультразвукового датчика. Данный датчик присутствует только в образовательной версии набора Lego mindstorms EV3. Тем не менее, пользователям домашней версии конструктора советуем тоже обратить внимание на данный урок. Возможно, что прочитав о назначении и использовании этого датчика, вы пожелаете его приобрести в дополнение к своему набору.
7.1. Изучаем ультразвуковой датчик
Главное назначение ультразвукового датчика, это определение расстояния до предметов, находящихся перед ним. Для этого датчик посылает звуковую волну высокой частоты (ультразвук), ловит обратную волну, отраженную от объекта и, замерив время на возвращение ультразвукового импульса, с высокой точностью рассчитывает расстояние до предмета.
Рис. 1
Ультразвуковой датчик может выдавать измеренное расстояние в сантиметрах или в дюймах. Диапазон измерений датчика в сантиметрах равен от
У нашего робота, собранного по инструкции small-robot-45544, ультразвуковой датчик уже закреплен впереди по ходу движения. Подключим его кабелем к порту «3» модуля EV3 и приступим к разбору практических примеров использования ультразвукового датчика.
Задача №14: написать программу, останавливающую прямолинейно движущегося робота, на расстоянии 15 см до стены или препятствия.
Для решения задачи воспользуемся уже знакомым нам программным блоком «Ожидание» Оранжевой палитры, переключив его в Режим: «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 2). Само решение будет похоже на решение Задачи №7.
Рис. 2
Решение:
- Начать прямолинейное движение вперед (Рис. 3 поз. 1)
- Ждать, пока значение ультразвукового датчика не станет меньше 15 см. (Рис. 3 поз. 2)
- Прекратить движение вперед (Рис. 3 поз. 3)
Рис. 3
Задача решена!
Задача №15: написать программу для робота, держащего дистанцию в 15 см от препятствия.
Поведение робота будет следующим:
- при значении показания ультразвукового датчика больше 15 см робот будет двигаться вперед, стараясь приблизиться к препятствию;
- при значении показания ультразвукового датчика меньше 15 см робот будет двигаться назад, стараясь удалиться от препятствия.
Мы уже знаем, что за организацию выбора выполняемых блоков в зависимости от условия отвечает программный блок «Переключатель» Оранжевой палитры. Установим для блока «Переключатель» режим «Ультразвуковой датчик» — «Сравнение» — «Расстояние в сантиметрах» (Рис. 4 поз.1). Параметр «Тип сравнения» блока «Переключатель» установим в значение «Больше»=2, а «Пороговое значение» определим равным 15 (Рис. 4 поз. 2)
. Такие настройки программного блока «Переключатель» приведут к следующему поведению программы: При показаниях ультразвукового датчика больше 15 см будут выполняться программные блоки, помещенные в верхний контейнер (Рис. 4 поз. 3), в противном случае будут выполняться программные блоки, помещенные в нижний контейнер (Рис. 4 поз. 4).Рис. 4
Поместим в эти контейнеры программные блоки, включающие движение вперед и назад. Для того чтобы программный блок «Переключатель» выполнялся многократно, поместим его внутрь программного блока «Цикл» Оранжевой палитры (Рис. 5).
Для того чтобы программный блок «Переключатель» выполнялся многократно, поместим его внутрь программного блока «Цикл» Оранжевой палитры (Рис. 5).
Рис. 5
Загрузите получившуюся программу в робота и запустите ее на выполнение. Если перед роботом отсутствует препятствие, то он поедет вперед. Поднесите руку близко к ультразвуковому датчику, попробуйте отводить — приближать руку. Как ведет себя робот? Ждем ваши комментарии к этому уроку.
7.2. Робот-полицейский
Принцип работы ультразвукового датчика очень похож на радар, который применяется для измерения скорости движущихся автомобилей. Как радар узнаёт скорость автомобиля? Он измеряет расстояние до движущегося объекта, ждёт заданное небольшое время и повторяет измерение. Разность расстояний — это пройденный путь автомобиля. Разделив пройденный путь на время между двумя измерениями, можно найти скорость, с которой двигался объект измерения.
Давайте же научим и нашего робота работе радара!
Рис. 6
6
Последовательность действий, выполняемых роботом, будет следующей:
- Робот ждёт появления в зоне контроля движущегося объекта;
- измеряет расстояние до объекта;
- ждёт 1 секунду;
- повторно измеряет расстояние до объекта;
- находит пройденное расстояние и сравнивает его с пороговым значением;
- выводит на экран результат и подает тревогу в случае превышения скорости.
Начнём создавать программу для нашего робота-полицейского.
- С помощью программного блока «Ожидание» ждём появления объекта в зоне контроля робота (Рис. 7 поз. 1). Расстояние до объекта передаем в программный блок «Математика» (Рис. 7 поз. 4).
- С помощью программного блока «Ожидание» ждем 1 секунду.
- Второй раз снимаем показание ультразвукового датчика (Рис. 7 поз. 3) и передаем полученное значение в программный блок «Математика» (Рис.
 7 поз. 4)
7 поз. 4) - В программном блоке «Математика» находим расстояние, пройденное объектом измерения за 1 секунду. Полученное значение передаем в программный блок «Сравнение» (Рис. 7 поз. 5) и выводим на экран (Рис. 7 поз. 6).
- С помощью программного блока «Сравнение» (Рис. 7 поз. 5) сравниваем пройденное расстояние с пороговым значением, равным 10. Результат сравнения двух чисел представляет собой логический вывод. Логический вывод может принимать одно из двух значений: «Да» или «Нет». Этот вывод мы передаем в прогаммный блок «Переключатель» (Рис. 7 поз. 7), настроив его на прием логических значений. Обратите внимание: шины данных, передающие логические значения, окрашены в зеленый цвет, в отличие от желтых шин данных, передающих числовые значения. (В дальнейшем мы подробнее ознакомимся с принципами обработки логических значений).

- С помощью программного блока «Переключатель» мы организуем две ветки поведения программы в зависимости от скорости объекта. Если объект за 1 секунду приблизился к роботу, больше чем на 10 см, значит, будем считать его приближение критическим и подадим сигналы тревоги (Рис. 7 поз. 8). В противном случае будем считать, что объект движется медленно, в этом случае робот включит зеленую подсветку клавиш модуля EV3 и произнесёт «Okay».
- В конце программы еще раз воспользуемся программным блоком «Ожидание» (Рис. 7 поз. 10) и «придержим» завершение программы на 5 секунд, чтобы успеть прочитать информацию на экране модуля EV3.
Рис. 7
Загрузите программу в робота, расположите робота так, чтобы перед ним на расстоянии 60 сантиметров отсутствовали другие предметы, запустите программу на выполнение. Перемещайте в направлении к роботу игрушечный автомобиль или объемный предмет, наблюдайте за реакцией робота. Попробуйте изменять пороговые значения в программе. Как изменяется поведение робота? Опишите свои наблюдения в комментарии к этому уроку.
Попробуйте изменять пороговые значения в программе. Как изменяется поведение робота? Опишите свои наблюдения в комментарии к этому уроку.
7.3. Ультразвуковой датчик — режим «Присутствие/слушать»
Как уже отмечалось выше, в этом режиме ультразвуковой датчик способен обнаруживать излучение другого ультразвукового датчика. Результатом обнаружения является логическое значение: «Да», если найдено ультразвуковое излучение, или «Нет», если ничего не найдено. Данный режим можно использовать, например, в состязаниях роботов-шпионов (описание режима уже говорит о том, что для его использования необходимо минимум два робота).
Задача № 16: необходимо написать программу, обнаруживающую другого робота, с работающим ультразвуковым датчиком.
Попробуйте написать программу самостоятельно, не подглядывая в решение!
Решение Задачи №16 Используя знания, полученные ранее, попробуйте самостоятельно разобрать вариант решения Задачи №16. Предложите свой вариант решения…
Предложите свой вариант решения…
Перевести 15 дюймов в см
›› Преобразование дюймов в сантиметры
Пожалуйста, включите Javascript для использования
преобразователь единиц измерения.
Обратите внимание, что вы можете отключить большую часть рекламы здесь:
https://www.convertunits.com/contact/remove-some-ads.php
Сколько дюймов в 1 см?
Ответ 0,39370078740157.
Мы предполагаем, что вы конвертируете между дюймов и сантиметров .
Вы можете просмотреть более подробную информацию о каждой единице измерения:
дюймов или
см
Базовой единицей СИ для длины является метр.
1 метр равен 39,370078740157 дюймов или 100 см.
Обратите внимание, что могут возникать ошибки округления, поэтому всегда проверяйте результаты.
Используйте эту страницу, чтобы узнать, как конвертировать дюймы в сантиметры.
Введите свои собственные числа в форму, чтобы преобразовать единицы измерения!
›› Таблица быстрого перевода дюймов в см
1 дюймов в см = 2,54 см
5 дюймов в см = 12,7 см
10 дюймов в см = 25,4 см
15 дюймов в см = 38,1 см
20 дюймов в см = 50,8 см
25 дюймов в см = 63,5 см
30 дюймов в см = 76,2 см
40 дюймов в см = 101,6 см
50 дюймов в см = 127 см
›› Хотите другие юниты?
Вы можете сделать обратное преобразование единиц из см в дюймы или введите любые две единицы ниже:
›› Стандартные преобразования длины
дюймов в десятые метры
дюймов в китайские мили
дюймов в гектометры
дюймов в миллимикроны
дюймов в милли
дюймов в тераметры
дюймов в сагены
дюймов в этаж
дюймов в зеттаметры
6
6 дюймов в микродюймы8 › ›
Определение: Дюйм
Дюйм — это название единицы длины в ряде различных систем, включая имперские единицы и обычные единицы измерения США. В ярде 36 дюймов, а в футе 12 дюймов. Дюйм обычно является универсальной единицей измерения в Соединенных Штатах и широко используется в Соединенном Королевстве и Канаде, несмотря на то, что в последних двух странах в 19-м веке была введена метрическая система.60-х и 1970-х соответственно. Дюйм по-прежнему широко используется неофициально, хотя и несколько реже, в других странах Содружества, таких как Австралия; примером может служить давняя традиция измерять рост новорожденных детей в дюймах, а не в сантиметрах. Международный дюйм определяется как равный 25,4 миллиметра.
В ярде 36 дюймов, а в футе 12 дюймов. Дюйм обычно является универсальной единицей измерения в Соединенных Штатах и широко используется в Соединенном Королевстве и Канаде, несмотря на то, что в последних двух странах в 19-м веке была введена метрическая система.60-х и 1970-х соответственно. Дюйм по-прежнему широко используется неофициально, хотя и несколько реже, в других странах Содружества, таких как Австралия; примером может служить давняя традиция измерять рост новорожденных детей в дюймах, а не в сантиметрах. Международный дюйм определяется как равный 25,4 миллиметра.
››
Определение: Сантиметр
Сантиметр (американское правописание сантиметр, условное обозначение см) — единица длины, равная одной сотой метра, действующей базовой единицы длины в системе СИ. Сантиметр является частью метрической системы. Это основная единица в системе единиц сантиметр-грамм-секунда. Соответствующей единицей площади является квадратный сантиметр. Соответствующей единицей объема является кубический сантиметр.
Сантиметр в настоящее время является нестандартным коэффициентом, поэтому часто предпочтительны коэффициенты 10 3 . Тем не менее, это практичная единица длины для многих повседневных измерений. Сантиметр примерно равен ширине ногтя взрослого человека.
››
Метрические преобразования и многое другое
ConvertUnits.com предоставляет интерактивный
калькулятор преобразования для всех типов единиц измерения.
Вы также можете найти метрические таблицы преобразования единиц СИ.
как английские единицы, валюта и другие данные. Введите единицу измерения
символы, сокращения или полные названия единиц длины,
площадь, масса, давление и другие типы. Примеры включают мм,
дюйм, 100 кг, жидкая унция США, 6 футов 3 дюйма, 10 стоунов 4, кубический см,
метры в квадрате, граммы, моли, футы в секунду и многое другое!
Что такое 5’2 см? 5 футов 2 дюйма в сантиметры.
Что такое 5’2 см?
Сколько сантиметров в 5 футах и 2 дюймах? Футы и дюймы
Дюймы
Сантиметры
Используйте калькулятор слева.
Что такое 5 футов2 в см? Переведите 5 футов 2 в сантиметры. Используйте калькулятор выше, чтобы рассчитать между футами и сантиметрами.
Больше высот
Футов и В СМ 5’2.01 157.5054 cm 5’2.02 157.5308 cm 5’2.03 157.5562 cm 5’2.04 157.5816 cm 5’2.05 157.607 cm 5’2.06 157.6324 cm 5’2.07 157.6578 cm 5’2.08 157.6832 cm 5’2.09 157.7086 cm 5’2.1 157.734 cm 5’2.11 157.7594 cm 5’2.12 157.7848 cm 5’2.13 157.8102 cm 5’2.14 157.8356 cm 5’2. 15
15 157.861 cm 5’2.16 157.8864 cm 5’2.17 157.9118 cm 5’2.18 157.9372 cm 5’2.19 157.9626 cm 5’2.2 157.988 cm 5’2.21 158.0134 cm 5’2.22 158.0388 cm 5’2.23 158.0642 cm 5’2.24 158.0896 cm
Ft and In см 5’2.26 158.1404 cm 5’2.27 158.1658 cm 5’2.28 158.1912 cm 5’2.29 158.2166 cm 5’2.3 158.242 cm 5’2.31 158.2674 cm 5’2.32 158.2928 cm 5’2.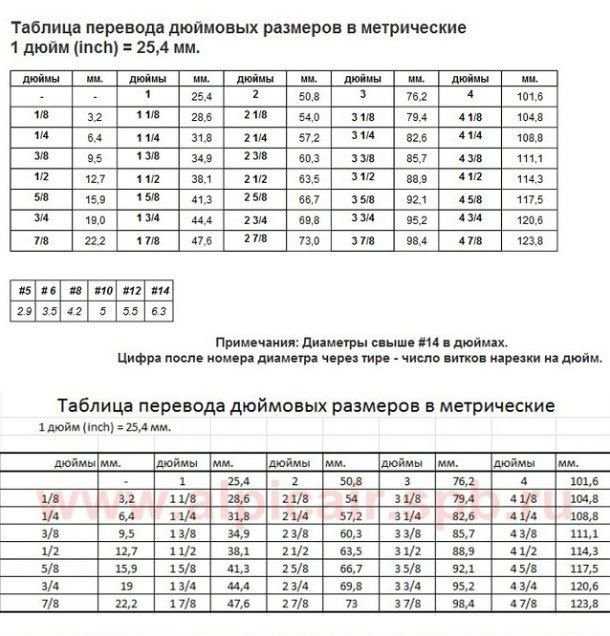 33
33 158.3182 cm 5’2.34 158.3436 cm 5’2.35 158.369 cm 5’2.36 158.3944 cm 5’2.37 158.4198 cm 5’2.38 158.4452 cm 5’2.39 158.4706 cm 5’2.4 158.496 cm 5’2.41 158.5214 cm 5’2.42 158.5468 cm 5’2.43 158.5722 cm 5’2.44 158.5976 cm 5’2.45 158.623 cm 5’2.46 158.6484 cm 5’2.47 158.6738 cm 5’2.48 158.6992 cm 5’2.49 158.7246 cm
Ft and In см 5’2. 51
51 158.7754 cm 5’2.52 158.8008 cm 5’2.53 158.8262 cm 5’2.54 158.8516 cm 5’2.55 158.877 cm 5’2.56 158.9024 cm 5’2.57 158.9278 cm 5’2.58 158.9532 cm 5’2.59 158.9786 cm 5’2.6 159.004 cm 5’2.61 159.0294 cm 5’2.62 159.0548 cm 5’2.63 159.0802 cm 5’2,64 159,1056 см 5’2,65 159,131 см 5’2.66 159,1564 CM 159,1564 CM 159,1564 CM 159,1564.0012 5’2.68 159. 2072 cm
2072 cm 5’2.69 159.2326 cm 5’2.7 159.258 cm 5’2.71 159.2834 cm 5’2.72 159.3088 cm 5’2.73 159.3342 cm 5’2.74 159.3596 cm
Feet and Inches см 5’2.76 159.4104 cm 5’2.77 159.4358 cm 5’2.78 159.4612 cm 5’2.79 159.4866 cm 5’2.8 159.512 cm 5’2.81 159.5374 cm 5’2.82 159.5628 cm 5’2.83 159.5882 cm 5’2.84 159.6136 cm 5’2.85 159.639 cm 5’2.
В ярде 36 дюймов, а в футе 12 дюймов. Дюйм обычно является универсальной единицей измерения в Соединенных Штатах и широко используется в Соединенном Королевстве и Канаде, несмотря на то, что в последних двух странах в 19-м веке была введена метрическая система.60-х и 1970-х соответственно. Дюйм по-прежнему широко используется неофициально, хотя и несколько реже, в других странах Содружества, таких как Австралия; примером может служить давняя традиция измерять рост новорожденных детей в дюймах, а не в сантиметрах. Международный дюйм определяется как равный 25,4 миллиметра. 15 33 51 2072 cm