
От земли к FPV Квадрокоптеру: Введение / Хабр
Всем привет! Сегодня мы продолжаем нырять в реальность, в железо, а точней сказать — взлетать. Но не так быстро! 🙂 До первого полета необходимо немного повозиться и даже налетать несколько часов на симуляторе.
Это не первая моя игрушка, если вам интересно радиоуправление, то зацените радиоуправляемые машинки:
Квадрокоптер, зачем?
Наверняка вам уже знакомо, что такое квадрокоптер и возможно он даже у вас есть. Но сегодня я постараюсь рассказать про квадрокоптеры которые люди собирают самостоятельно. Зачем они это делают, спросите вы? Например для меня это отдушина от сдвиганья кнопки на пиксель влево, на пиксель вправо, пока дизайнера не отпустит.
«Обычные», потребительские квадрокоптеры, лишены веселья. Сейчас конечно уже появляются разные конфигурации, но если взять самые популярные, например — DJI Mavic, то вопросов к качеству и выполняемым им задачам нет. Но это не то. У себя между ног, пролелеть не получится, cделать мертвую петлю или хотя бы бочку не выйдет, лететь со скоростью 120км+, не знаю, может? Думаю нет. Я уже не говорю про дальность и FPV.
В общем, ограничений много и хочется собрать квадрокоптер который будет доставлять вам удовольствие. Возможно вы хотите учавствовать в гонках, снимать более динамические кадры или просто нанюхаться флюса пока припаиваете моторы. В любом случае, чувство полета птицы и веселья гарантированно только со своим, собранным своими руками квадрокоптером.
Как говорится, лучше один раз увидеть, чем сто раз услышать. Предлагаю вашему вниманию ряд видео, разного жанра:
MinChan FPV готовится к гонке (это не ускоренное видео)
Фристаил
Cinematic FPV съемка
Что такое FPV?
First-person view — вид от первого лица.
First Person View (сокр. FPV) — вид от первого лица. Такой аббревиатурой называют одно из направлений радиоуправляемого авиамоделизма. В данном случае осуществляется не только управление авиамоделью по радиоканалу системы радиоуправления, но и приём с модели видео изображения по дополнительному видео-радиоканалу в режиме реального времени. Пилот, управляющий авиамоделью, видит изображение, получаемое с видеокамеры при помощи устройств отображения: мониторов, телевизоров, видео-очков, видео-шлемов. Разделяют две подгруппы направления: Low Range FPV и Long Range FPV. В первом случае используют стандартный набор для FPV, включающий маломощный передатчик видеосигнала, позволяющий летать в зоне действия стандартного передатчика радиоуправления. Для дальних полетов используют усилители мощности или более мощные передатчики как для управления моделью, так и для передачи с неё видеосигнала.
На носу у квадрокоптера камера, которая снимает все происходящее и передает изображение на очки пилота. Вы как будто в воздухе и летаете.
Существует множество разных очков и две основных технологии передачи видео. Аналоговая и цифровая технология.
Первое видео, в котором пилот тренируется на гоночном квадрокоптере, видно, что такое аналоговая система FPV. Картинка похожа на ту, что мы видели в детстве на аналоговом ТВ. Она может быть с кучей помех, но при этом у нее минимальный латенси (нет лагов), с дальностью картинка постепенно шумит все больше и больше.
Цифровое FPV пока еще сырая технология, но у меня никаких нареканий нет. Из минусов которые могут быть, можно очевидно выделить — лаги или даже фризы (зависания картинки). Но такие системы как DJI FPV, местами даже более пробивные через стены и на расстояние чем аналоговые. Поэтому, все это очень спорно и субъективно по ощущениям. Для гонок принято использовать аналоговые системы, быть может это скоро изменится.
(DJI FPV)
Более подробно рассмотрим комплектующие для FPV в следующих статьях этого цикла.
С чего начать?
Я в этом деле новичок и наверное часа в воздухе не пробыл. Но у меня есть квадрокоптер и он летает. Я расскажу как лучше начать исходя из своего опыта и того как советуют это сделать буквально все. Где-то может быть я не буду мега технически детальным и правым, но это и не надо. Думаю информация в любом случае актуальней быть не может. Ведь я новичок, который смог и пишу для новичков 🙂
Вы можете начать со сборки квадрокоптера, но я последовал советам и начал с покупки аппаратуры. Причины как минимум две.
Причина номер раз
Так как режим полета ACRO или 3D
Существует несколько симуляторов. На слуху два — Liftoff и VelociDrone, они не бесплатные, но и не дорогие. Возможно можно найти где скачать… Но я купил Liftoff в стиме, что поделать, все равно пользуюсь и учусь новым трюкам там. Какой выбрать, мне сказать сложно, думаю особой разницы нет. Liftoff разработан при поддержке RotorRiot, команды которая уже нормально так поставило FPV на рельсы бизнеса. Но звезда фристайла Mr Steele советует VelociDrone. В общем — на ваш вкус.
Аппаратура подключается как джойстик по USB:
Полет на квадрокоптере сложно описать словами. Несмотря на то, что общая механика управления на первый взгляд простая:
Присутствуют все те же оси, что и у самолета, но полет отличается. Например если вы даете больше газу, то самолет летит быстрей, в ту сторону в которую тычет его нос. Надеюсь вы понимаете, это не супер точное описание, но плюс-минус так и есть. В случае же с квадрокоптером, газ влияет на скорость вращения моторов, но в зависимости от его положения относительно осей, это может означать высоту, скорость с которой вы летите вперед, скорость трюков, торможение. Иногда кажется, что «воздушный дрифт» может отлично описать ощущения.
По началу было много слез, банально не понимаешь как повернуть, но со временем привыкаешь. Буквально на 3тий день я смог пролететь трассу в симуляторе. Звучит как куча времени, но я летал не больше часа в день. Местами начал ловить себя на мысли — блин как я это сделал? Мозг каким-то магическим образом привыкает ко всем этим осям и вы даже не задумываетесь как пройти то или иное препятствие. Практика и еще раз практика. Словно вы учитесь ходить.
Причина номер два
После того как вы полетаете на симуляторе, может оказаться, что вам не нравится. Но вы влипли только на аппаратуру и симулятор. По возможности можно продать или вернуть.
Квадрокоптеры собираются с очень разными бюджетами, но все равно полный набор всего необходимого, включая такие вещи как зарядка и может быть даже паяльник, складываются в хорошую сумму.
Так же от аппаратуры, в некотором роде зависит, то, что вы будете собирать, а точнее какие комплектующие покупать. В этот список входит приемник и long-range системы.
Какую аппаратуру выбрать?
(Taranis Q X7S)
Честно сказать, так как я не эксперт, а аппаратуры очень много, всевозможное обилие разных фишек и различия протоколов передачи данных, могут завести в дикий тупик. Не говоря уже о маркетинговых ходах и конкуренция между производителями. Поэтому я исходил из базовых вещей, которые смог понять, плюс рекомендаций сообщества.
Буквально все, кого я читал и смотрел, рекомендуют Taranis Q X7. Это отличная аппаратура, которая относительно не дорогая и обладает всем, что может понадобиться новичку. А самое главное, она хорошо известна радиолюбителям. Про нее много информации в интернете и вам наверняка кто-то поможет, если будут какие-то проблемы.
Составляющие аппаратуры на которые стоит обратить внимание
Выбор аппаратуры это дело вкуса, может быть вам не нравится Taranis. Поэтому для себя я выделил несколько критериев, которые помогут вам определиться.
Первое это прошивка. Существует open source проект, который называется OpenTX.
OpenTX — это своего рода Android для аппаратуры. Проект развивается и пожалуй самый популярный. Так как я новичок, я еще не осознал насколько это мощный инструмент, но знаю, что есть поддержка LUA скриптов, а значит возможности практически безграничны.
(один из экранов OpenTX)
Стоит обратить внимание на переключатели и стики. Количество переключателей — дело сугубо индивидуальное, так как переключателей для квадрокоптера много не нужно. В моем случае я использую всего два. Один для арминга (аля включение двигателей) и включение FPV модуля. Но так как аппаратура может использоваться для управления других моделей, стоит задуматься о покупке «на вырост», вдруг соберете, что-то еще. Самолет например.
Стики, вещь более деликатная. Основное отличие которое может быть, это внутреннее устройство.
«Простые» стики используют потенциометры для определения положения стика. Более продвинутые стики используют датчики на основе эффекта Холла. Такие стики более точные и плавные в ходе. В случае с Taranis Q X7, стики можно купить отдельно и заменить. Но есть версия Q X7, в которой уже стоят такие стики.
И как по мне самое главное, это возможность установки радио модуля. В каждой аппаратуре есть свой радио модуль, но как правило брендированный и работает только с приемниками того же бренда. Так же такие модуля не отличаются мощностью, а следовательно дальностью. Поэтому обращайте внимание на протоколы с которыми умеет работать аппаратура и возможность вставки своего модуля.
(Taranis с TBS Crossfire модулем)
Как держать стики
Это холиварная тема, масштабов пробелы vs табы. Для того, что, бы понять как лучше, стоит пробовать.
Так как я провожу не мало времени перед телеком с PS4, я сразу же схватился за стики так:
Но со временем понял, что они немного отличаются, ход более жесткий (он кстати настраивается подкручиванием пружинок) и мне гораздо удобней использовать такую хватку:
Заключение
Надеюсь вы узнали, что-то новое. FPV еще только развивается и самое время попробовать это хобби. В следующих статьях мы детально рассмотрим строение квадрокоптера, где покупать (не в целях рекламы, просто это может быть квестом), где летать и прочие важные вопросы.
Полезные ссылки
How to FPV? FASTEST WAY | First Purchase? | (Part 1)
How To 10 FPV Freestyle Tricks | LEARN THESE FIRST
65 Tech Tips For FPV Pilots | YOU DON’T KNOW #40 I GUARANTEE IT
Про симуляторы на русском
Классные каналы
Joshua Bardwell — от того как паять, до как летать и настраивать коптер. Много технической инфы.
Mr Steele — фристаил
Johnny FPV — FPV сьемка
Русскоязычные каналы:
Mustfly — FPV фристайл и гонки, в том числе и на маленьких «комнатных» микро квадрокоптерах. Канал ведет команда FPV энтузиастов из Москвы.
Сергей Белаш — настоящие FPV приключения, множество интересных мест в России и мире, природа и заброшки с необычного ракурса.
AnikFPV — тесты, обзоры и сравнения различных RC моделей, электроники для них, на русском языке.
RCSchoolModels
Спасибо поправил ошибки Oz_Alex
Спасибо поправил ошибки User2Qwer
Что такое FPV для квадрокоптеров
Сложностей выбора квадрокоптера для новичка существует достаточно много. Одной из основных является очень специфическая англоязычная терминология с включение аббревиатур, которые непосвященный человек при любых обстоятельствах не в состоянии расшифровать. Таких терминов немного, но, несмотря на это, их легко спутать. Одним из таких является и понятие FPV.
Купить лучшие дроны с FPV по лучшей цене вы можете в нашем магазине — бесплатная доставка по России и СНГ!
Понимание термина FPV
Аббревиатура FPV используемая для летающих дронов появилась сравнительно недавно. Она описывает технологию, полное название которой звучит как First Person View. В переводе это означает Вид От Первого Лица. Ее появление связано напрямую с использованием камер, установленных на борту летающего дрона. Ее суть заключается в том, чтобы предоставить пользователю технологии, в частности оператору, возможность просматривать в режиме реального времени картинку, захватываемую камерой.
FPV позволяет увидеть удивительные панорамыПрименение этой технологии практически безгранично. Ее можно применять как для развлечений, так и в профессиональной сфере. Поэтому дроны, в частности мультикоптеры и квадрокоптеры, с функцией FPV находят свое применение в разных отраслях хозяйства. Их используют фермеры для внесения удобрений и слежения за скотом, органы правопорядка и сопряженные с ними спасательные службы также их используют, но применяют их в тех местах, где появление человека связано с риском для жизни, а не только с удобством. С их помощью спасатели могут осмотреть объект, прежде чем предпринимать меры по ликвидации аварии или задержании вооруженных преступников.
Для рядовых пользователей, в том числе подрастающей молодежи – это в первую очередь развлечение, а далее – уже новый способ исследования окружающего мира.
Развитие технологии FPV напрямую связано с используемыми в ней другими технологиями – видео и фотосъемкой, а также беспроводной передачей данных. Дальнейший прогресс в этих направлениях дает следующий виток в ее улучшении, поэтому год за годом она становится только лучше.
Как устроена система FPV
Функция FPV невозможна без FPV системы. Она многокомпонентная и реализована посредством нескольких технологий. Одна из них подразумевает захват изображения, вторая – обработку полученных данных, их дополнение при необходимости информацией, считанной с датчиков для реализации сопряженной технологии OSD, третья – беспроводной передачей и приемом сигнала для донесения картинки конечному пользователю – оператору.
Все технологии связаны неразрывно и создаются из нескольких модулей. Часть из них устанавливается на летающий дрон – квадрокоптер, а часть находится у конечного пользователя. При этом модули, устанавливаемые на летающий объект, могут быть как встроенными, так и съемными. Модули, находящиеся у пользователя, в зависимости от используемых технологий передачи данных могут быть установлены в управляющую аппаратуру, либо являться частью сопряженного мобильного устройства при условии его использования.
FPV — одна из причин покупки хорошего дронаПо сути технология FPV реализована следующим образом. Камера захватывает изображение и передает полученные данные графическому чипу. Чип обрабатывает изображение и преобразовывает его в сигнал. Модуль передачи данные оправляет данные с чипа на связанный приемник посредством беспроводного протокола передачи данных. На приемнике данные вновь преобразуются в графический вариант и выводятся на дисплей.
Аксессуары для квадрокоптера с FPV
Если камеры и передатчики имеют примерно одинаковую модель конструкции, то приемники могут быть сконструированы по-разному. Так, среди аксессуаров, применяемых для приема сигнала FPV, можно выделить сразу несколько популярных вариантов.
Основной и самый старый способ – использование выделенного экрана с приемником сигнала. Они могут быть как совершенно компактными, помещаемыми на ладони, так и достаточно габаритными – настольными. Можно даже встретить мобильные, но крупные модели, перемещаемые на автомобилях. Подобные экраны могут дополняться вспомогательными аксессуарами, например, твердыми или гибкими шторами, защищающими дисплей от солнечных бликов при условии, что экран имеет небольшую яркость и меркнет на солнце.
Более современный способ организации технологии, обычный для моделей начального уровня, к которым привыкли рядовые пользователи – использование тех же экранов, но уже в составе управляющей аппаратуры. Они обычно гораздо компактнее экранов, используемых отдельно, поскольку закономерно правило: чем больше размеры встроенного экрана, тем выше стоимость модели. Примером таких аппаратур являются универсальные изделия, выпускаемые под маркой Devo, которые могут использоваться сразу с несколькими моделями квадрокоптеров и прочих летающих дронов.
Для эффекта полного погружения FPV может предполагать специальные очкиСейчас такие модели уверенно теряют популярность с появлением нового варианта, когда для функции FPV в качестве принимающего устройства используются мобильные гаджеты, в частности планшеты и смартфоны. В зависимости от модели они могут использовать для приема сигнала технологии Bluetooth, wi-fi и им подобные.
Инновационным вариантом, используемым технологии FPV, является применение шлемов и очков виртуальной и дополненной реальности. В данном случае конечный пользователь является не просто наблюдателем. Он полностью погружается в процесс визуализации, что позволяет себя почувствовать настоящим пилотом летательного аппарата.
Популярные модели с FPV
В последнее время количество моделей, поддерживающих функцию FPV стало достаточно много, в то время как еще пару лет назад это было всего несколько моделей, в том числе популярные изделия, выпускаемые под брендом DJI. Сейчас все модели, активно продаваемые этой компанией, поддерживают описанную технологию, где она доведена буквально до совершенства.
В частности, можно отметить специально разработанную для ее реализации технологию передачи данных DJI Lightbridge, которая позволила существенно улучшить качество передаваемого изображения и скорость передачи данных.
Купить лучшие дроны с FPV по лучшей цене вы можете в нашем магазине — бесплатная доставка по России и СНГ!
Видео о сборке FPV квадрокоптера
FPV OSD для квадрокоптера, что это и как выбрать — Все о квадрокоптерах
В этой статье мы раскроем вопрос о OSD FPV квадрокоптера, зачем оно нужно, как выбрать и как установить. На сегодня OSD является неотъемлемой частью системы даже в гоночных квадрокоптерах.
Содержание
- Что такое OSD?
- Какие данные показывает OSD на экране?
- Какое бывает OSD?
- Примеры подключения внешней платы OSD
- Какое OSD я использовал
- Где купить OSD?
Что такое OSD?
OSD — это On Screen Display, что в переводе с английского — информация на экране. Простыми словами, OSD — это информация, которая накладывается на видеопоток, и вы это все видите на экране шлема или в очках.
Пример того, какую информацию можно выводить на экран:

Перевод: https://oscarliang.com
OSD fpv может быть как встроенным в оборудование квадрокоптера, так и представлять собой отдельную внешнюю плату, которую вы подключите к полетному контроллеру и к камере. Благодаря этой функции вы сможете контролировать различные параметры дрона в режиме реального времени и в полете.
 Пример внешней платы OSD
Пример внешней платы OSD Пример встроенного в полетный контроллер OSD
Пример встроенного в полетный контроллер OSD
 Пример OSD в камере FPV
Пример OSD в камере FPVНа экран шлема или очков вы сможете выводить любую информацию, которую может получить ваш квадрокоптер, например, напряжение аккумулятора, высота; если есть GPS, то сможете видеть скорость и в каком направлении летит ваш дрон.
Конечно, OSD не обязателен для полетов по FPV, но это очень полезный инструмент, чтобы всегда быть в курсе состояния квадрокоптера и избежать различных проблем — например, вы всегда будете в курсе напряжения аккумулятора и сможете вовремя совершить посадку.

Какие данные показывает OSD на экране?
OSD может выводить различную информацию, какую именно, опишем ниже.
Напряжение аккумулятора (Battery Voltage)
Одна из самых важных и нужных функций, в основном это решающая функция, ради которой многие пилоты устанавливают платы OSD на гоночные дроны. Эта функция есть во всех ОСД и отображает текущее напряжение аккумулятора на экране очков или шлема.
Важно!
При резком газе у аккумулятора также резко падает и напряжение, из-за чего вы будете видеть предупреждение на экране о низком напряжении и необходимости посадки, но после того, как вы убавите газ, напряжение стабилизируется.
Таймер (Timer)
Во многих OSD есть два таймера — время полета и время во включенном состоянии. Таймер полета привязан к режимам полета — как только вы переключаетесь в АКРО, стабилизацию, горизонт и т. д., включается таймер полета. Полезная функция для расчета примерного времени полета.
Датчик тока (Current sensor)
Многие путают его с напряжением аккумулятора (Battery Voltage), но этот параметр показывает, сколько потребляется тока на данный момент и сколько в общем потреблено mAh. Поэтому этот параметр является более точным индикатором того, сколько в аккумуляторе осталось заряда.
Отображает мощность сигнала в процентах. Полезная функция для съемочных самосборных дронов и дальнолетов. Чем дальше будете лететь, тем слабее будет уровень сигнала.
Подробнее о RSSI: https://profpv.ru/приемник-передатчик-rssi-что-это-ра/
Предупреждения (Warning)
Многие OSD имеют функцию предупреждения на экране, например, сигнализирующую о низком заряде или низком проценте RSSI. Это очень удобно, если вы залетались и не заметили, как заряд приблизился к критическому порогу. Если вы настроите сигнализацию на экране при достижении определенного порога, вам на экране в середине (или там, где вы расположите) будет появляться надпись о низком заряде и необходимости посадки или другое предупреждение, в зависимости от настроек.
Режим полета (Flight Mode)
Отображает на экране, если, конечно, вы это настроите, текущий режим полета. Удобно для новичков или для тех, кто летает в 3 и более режимах, в основном это у съемочных квадрокоптеров. Также нужная функция, чтобы не было такой ситуации: вы забыли, что включили режим АКРО, но думаете, что летите в режиме стабилизации — сделали крен вправо, а дрон не выравнился и начинает падать.
GPS
Нужная функция для дальнолетов и съемочных дронов. Как правило, на гоночные дроны GPS не ставят по причине коротких дистанций полетов. Функция GPS будет работать только при наличии на вашем дроне этого датчика. Функция показывает такие данные, как: координаты дрона, скорость, высота (хотя высота будет точнее при использовании датчика барометра или сонара) и направление движения по отношению к точке взлета — вам будет показывать стрелка в направлении, где вы находитесь.
Линия горизонта (Artificial Horizon)
Все, наверное, видели из фильмов и документалок из кабины пилотов линии на экране, которые меняли положение в зависимости от положения самолета? Эта функция делает то же самое. В середине экрана вы будете видеть линию горизонта, которая будет помогать вам выравнивать дрон, опираясь на положение линии. Данные берутся с акселерометра
Выглядит это вот так:

Какое бывает OSD?
OSD бывает:
- Встроенное;
- Внешнее.
По типу соединения:
- Встроенное в полетный контроллер, видеопередатчик, камеру FPV;
- Гибридное соединение: можно не подключать к полетному контроллеру, а можно подключать;
- Подключаемое (независимое) к камере и видеопередатчику;
- Подключаемое (зависимое) к полетному контроллеру, камере и видеопередатчику.
Внешняя плата OSD
Внешние OSD платы подразделяются на:
- Зависиме;
- Независимые.
Независимые представляют из себя отдельную внешнюю плату, которая не подключается к полетному контроллеру, а подсоединяется только к камере и видеопередатчику. Как правило, такие платы могут подключаться к GPS и другим датчикам. Хорошими независимыми OSD считаются бренды Skylark и Super Simple OSD.
Зависимые — берут всю информацию у полетного контроллера через последовательный порт RX\TX и просто накладывают ее на видеопоток, сами ничего не обрабатывают.
В качестве хорошей платы приведем пример minimOSD от компании HobbyKing. Все данные эта плата берет у полетного контроллера, что расширяет возможности вывода различной информации, ведь ПК обрабатывает все данные, которые может получить от компонентов дрона.
Гибридные OSD можно подключать к полетному контроллеру, а можно не подключать. Если не сделаете этого, то, например, там будут данные о RSSI и напряжении, а если подключите к ПК, то будут доступны все данные, которые может обработать полетный контроллер, например, GPS. Преимущества очевидны.
Примеры подключения внешней платы OSD
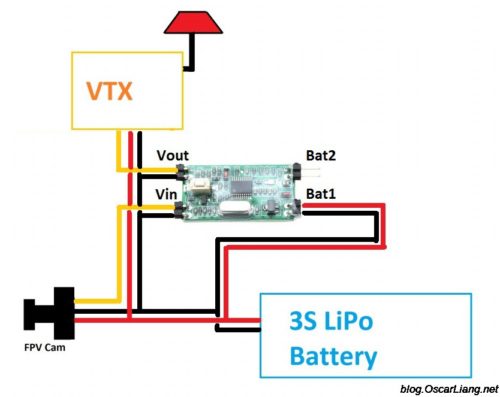
Подключение внешней независимой платы OSD
Простой пример подключения внешней платы OSD. В пример взята плата OSD Hobbyking Super Simple. Подключение в цепь с FPV камерой, видеопередатчиком и аккумулятором 3S LiPo. Есть возможность принимать значение напряжения второго аккумулятора с помощью порта Bat2:
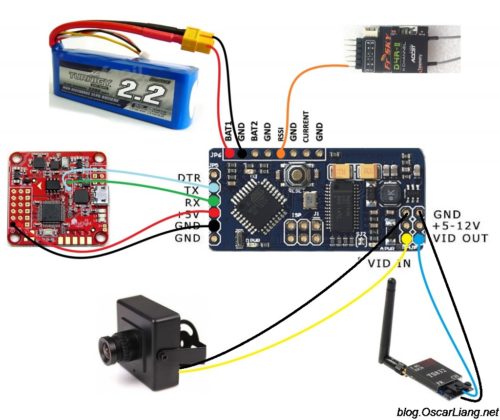
Подключение внешней гибридной платы OSD
Здесь для примера плата MinimOSD, которая отображает и считывает сама уровень сигнала RSSI и напряжение аккумулятора. Но, если вы подключите к ней еще и полетный контроллер (он изображен уже подключенным слева, красный), то данных будет больше. Например, если к ПК подключен датчик GPS, то данные с датчика вы сможете выводить на экран.
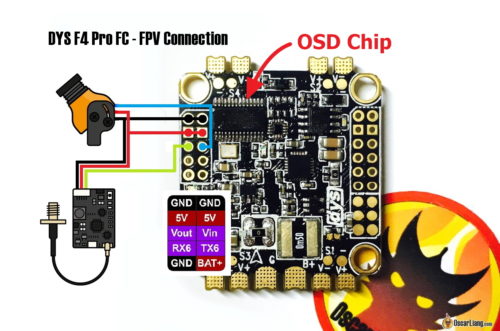
Встроенное в полетный контроллер OSD
Такое OSD в основном есть в полетных контроллерах Betaflight, но на сегодня все больше производителей тоже начинают интегрировать эту плату в свои ПК:
Встроенное в FPV камеру OSD
Такое ОСД отличается скудным набором функций, обычно оно ограничивается таймером и датчиком напряжения аккумулятора, хотя для гоночного дрона этого вполне хватит.
Никаких настроек не требуется, все будет работать при стандартном подключении камеры:
Какое OSD я использовал
Betaflight OSD
Встроенное OSD Betaflight очень удобное. Правда, использоваться должна прошивка Betaflight. Отсутствие необходимости прокладки проводов и что-то паять дает много плюсов в пользу этого выбора.
MinimOSD
MinimOSD (не путать с микро) — классная и мощная внешняя плата OSD, с помощью которой можно выводить практически любую информацию. Эта плата была лучшим моим выбором, пока не вышел полетный контроллер с встроенным OSD Betaflight. Плата поддерживает работу с различными ПК, например, Naze32, CC3D, Multiwii, APM и PixHaw. Требуется прошивка с помощью программатора ардуино.
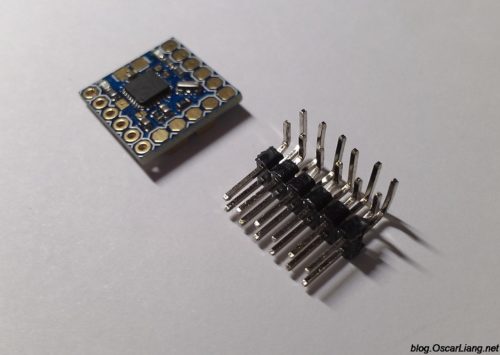
MinimOSD Micro
Маленькая плата, которая умеет накладывать на видеопоток любую информацию с датчиков, которую предоставит полетный контроллер. Для прошивки тоже требуется программатор ардуино. Питается от 5V, поэтому не перепутайте контакты при подключении.
3 OSD выше — самые популярные у пилотов СНГ, их легко купить на Алиэкспресс или Банггуд. Ниже в пример приведем еще несколько для общего развития, но их купить сложнее и популярностью они не пользуются.
BrainFPV
BrainFPV — это полетный контроллер, у которого есть встроенное OSD. Хороший выбор для тех, кто не хочет заморачиваться с прошивкой платы и проводами. Всю настройку можно произвести из интерфейса управления полетным контроллером.
Skylark OSD
Skylark OSD — внешняя плата OSD с датчиком GPS. Умеет благодаря этому показывать координаты и прочую информацию с GPS, напряжение аккумулятора и таймер.
Это была моя первая плата OSD, тогда я искал такую, которую не нужно было подключать к полетному контроллеру, но, чтобы было GPS. Тогда эта плата отлично справлялась со своими задачами и всем меня устраивала. Плата идет в комплекте с модулем GPS и датчиком тока. Единственный минус — плата слишком большая для использования на гоночных дронах.
Super Simple OSD
Как следует из названия, это простейшая плата с OSD. Умеет показывать только таймер и напряжение аккумулятора. Работает с аккумуляторами до 4S.
Hobbyking E-OSD
Тоже простейшая плата OSD, умеет показывать только напряжение и таймер и работает только с аккумуляторами 2-3S. Ее можно прошить и тогда, используя 2 порт BAT2 (выход на второй аккумулятор), можно выводить данные RSSI.
Где купить OSD?
Как и все компоненты для сборки дронов, покупать OSD рекомендуем на Aliexpress и Banggood.
Betaflight F4 Pro (полетный контроллер 4 поколения от Betaflight) с встроенным OSD — Aliexpress | Banggood
MinimOSD — большая гибридная плата OSD — Aliexpress
MinimOSD Micro — маленькая плата OSD, которая берет данные с ПК — Aliexpress | Banggood
Если вы нашли ошибку или ссылку, которая не работает, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Самодельный FPV квадрокоптер
Здравствуйте, уважаемые читатели! В этой статье хочу поделиться материалом по сборке FPV квадрокоптера на базе рамы, рассчитанной на установку пятидюймовых пропеллеров – Realacc Kylin 210. Главная особенность данной рамы – беспроблемное крепление бюджетных экшн камер типа Xiaomi YI и ей подобных.
Эта статья рассказывает о том, как сделать квадрокоптер своими руками из готового набора рамы, а так же про установку электроники на дрон.
Поставляется комплект рамы Realacc Kylin 210 в обычном полиэтиленовом пакете, все элементы рамы просто ссыпаны в одну кучу.
Диагональ по центрам моторов – 210 мм. Что ясно из названия рамы – Realacc Kylin 210.
Форма основания – вытянутый крест, в длину рама на 8 мм больше чем в ширину.
Толщина основания – 5,3 мм. Рама очень жесткая на прогиб, это очень хорошо.
Ширина лучей – 13 мм, этого вполне достаточно для размещения отдельных регуляторов на каждый мотор.
Остальные карбоновые детали толщиной – 2 мм. Кроме верхней деки и проставки в креплении экшн камеры, они толщиной – 1.5 мм.
Распил ровный, без видимых косяков и задиров слоя.
На резе хорошо видна структура слоев китайского псевдокарбона. Обычно это два или три слоя углеткани, остальное текстолит. Так, и цена соответствует качеству материала.
Рама собирается за несколько минут. Сначала собираем верхушку рамы с креплением для курсовой и экшн камеры.
На основание рамы прикручиваем комплектные стойки.
Прикручиваем верхнюю часть рамы к стойкам. Рама готова.
Вес пустой рамы – 94 г.
Для сборки квадрика, кроме вышеупомянутой рамы буду использовать: приемник – FrSky XSR для аппаратуры TARANIS; курсовую камеру (можно использовать любую на ваш выбор) – Foxeer HS1177 V2.
Полетник с интегрированной PDB и видеопередатчиком – HGLRC F4 V5PRO. На данный момент данный контроллер снят с производства и его прямой наследник – HGLRC F4 V6PRO. Крепление 30.5×30.5 мм.
Четыре регулятора оборотов для бесколлекторных моторов с поддержкой протокола D-Shot 600 — Racerstar RS40A V2.
Комплект из четырех бюджетных моторов – Racerstar Racing Edition BR2205 2600KV.
Приступим к сборке коптера. Полетный контроллер установлю на стойки с виброразвязкой – Flight Controller Anti-Vibration Fixed Screws.
Пришлось подложить шайбы, чтобы притянуть стойки к раме.
Перед сборкой все острые кромки рамы я скруглил надфилем, а торцы покрыл несколькими слоями акрилового лака (можно клеем на основе цианакрилата).
Изолирую лучи одним слоем изоленты, на случай, если он лопнет, и куски карбона могут замкнуть контакты регулятора.
К основанию рамы прикручиваем все четыре мотора. Я креплю мотор на все четыре болта, хотя можно и на два, если с фиксатором резьбы.
Чтобы в полете ничего само не открутилось – использую фиксатор резьбы.
Прикручиваем полетный контроллер к стойкам.
Закрепляем регуляторы на лучах парой оборотов изоленты, это необходимо для того, чтобы определить конечную длину проводов.
Согласно инструкции на полетный контроллер, паяем силовые и сигнальные провода от регуляторов на плату контроллера.
Паяем провода от моторов к регуляторам. К каким фазам, какой провод подключать значения особого не имеет и влияет только на направление вращения моторов. На этапе настройки можно поменять направление вращения моторов в программе blhelisuite.
Проверяем качество пайки, чтобы в полете ничего не отвалилось.
Рекомендую после пайки все соединения заизолировать специальным лаком, я использую несколько слоев plastik 71 и подсушиваю феном.
К полетнику подключаем все компоненты, включая антенну (без антенны сгорит видеопередатчик) и проверяем на работоспособность. Убедились, что все работает – можно окончательно заканчивать сборку и прикрутить верхнюю часть рамы к основанию. В процесс настройки полетного контроллера подробно вдаваться не буду, кому интересно можете подробно ознакомиться в этой статье – «Собираем и настраиваем квадрокоптер на базе комплекта – AuroraRC C2 Flytower OMVT F4», в разделе настройка.
На верхней деке есть отверстие для установки SMA разъема, к которому будет прикручиваться антенна. Для полетов вокруг да около такая антенна не нужна, и будет место для приемника.
Установлю вот такой диполь (Original MMCX 5.8GHG 3dBi FPV Antenna) с разъемом MMCX как раз подходит к полетнику.
Окончание антенны дополнительно усилю вторым слоем термоусадки.
На освободившееся место стяжками закрепляем приемник.
Усы антенн выводим за пределы рамы и закрепляем на обрезанных стяжках с помощью термоусадки. Угол в 90 градусов между лучами антенн не выдержан, но оно и так нормально работает на удалении до 200 метров.
Фиксируем антенну видеопередатчика.
Про пищалку тоже не забыл, притянул стяжкой к основанию рамы.
С помощью пинцета и какой-то матери, в пазы основания рамы продеваем стяжку-велкро для фиксации аккумуляторов. Для этой операции нужен пинцет с тонкими и изогнутыми губками, иначе намучаетесь.
Для более надежной фиксации акума на раме, использую липучку типа репейник (крючки на раме). Но можно установить прилагаемую к комплекту рамы прокладку из пенорезины. Как по мне – липучка надежней и не надо потом лазить на корячках по всему полю и искать куда отлетел акум при падении и ударе об землю.
Последний штрих – окончательно фиксируем регуляторы на лучах рамы, кто-то это делает стяжками, я обычно просто приматываю изолентой.
В итоге получилось:
Вес квадрика с пропами «трешками» – 332 г
Вес с акумом 4S 1300 mAh – 486 г.
Немного хочу рассказать об особенностях рамы Realacc Kylin 210. Ширина проема для установки FPV камеры 27.8 мм, и рассчитана на крепление камер через силиконовые демпферы, у меня таковых нет, подложил попавшиеся под руку шайбы.
Боковые карбоновые пластины не дадут установить стек выше двух этажей при использовании длинных стоек. Если поколхозить со стойками, то думаю три этажа вкорячить все-таки можно.
Площадка для установки экшн камер имеет регулировку угла наклона.
Камера закрепляется обычной велкро-стяжкой, держится вполне надежно и не отлетает даже при жесткой посадке в стиле – «морковка» с 5 метров.
Квадрик с таким конфигом летит вполне зачетно, даже несмотря на изначальный небольшой люфт в моторах (люфтили прямо из коробки).
Полеты самодельного квадрокоптера
Realacc Kylin 210 – неплохой вариант компактной рамы для самостоятельной сборки FPV коптера. Рама имеет хорошую жесткость при небольшом весе и вполне пригодна для хобийных полетов или тренировок.
В заключение приведу несколько вариантов рам с подобными креплениями для экшн камер.
Realacc X210 214mm 3mm/4mm
Купить: BangGood, AliExpress Realacc X210 Pro 214mm
Купить: BangGood, AliExpress Realacc X210 V+ 214mm
Купить: BangGood, AliExpress
Электроника и компоненты которые использовались в статье:
Realacc X210 4mm Frame
Купить: BangGood, AliExpress Realacc Kylin 210 210mm
Купить: BangGood, AliExpress FrSky XSR 2.4GHz 16CH
Купить: BangGood, AliExpress Foxeer HS1177 V2 600TVL
Купить: BangGood, AliExpress HGLRC F4 V5PRO Flight
Купить: BangGood, AliExpress HGLRC F4 V6PRO Flight
Купить: BangGood, AliExpress 4X Racerstar RS40A V2
Купить: BangGood, AliExpress 4X Racerstar Racing Edition
Купить: BangGood, AliExpress Original MMCX 5.8GHG 3dBi
Купить: BangGood, AliExpress
автор: actualvape
Похожие статьи:
Видеоподборки про RC моделизм → Квадрокоптер своими руками [часть 4 — подсветка, виброзащита и камера]
Видеоподборки про RC моделизм → Сборка гоночного Дрона на формованной раме и регуляторе 4в1
Квадрокоптер своими руками → Сборка миниквадрокоптера под FPV
Видеоподборки про RC моделизм → Ставим систему FPV на квадрокоптер [часть 5]
Квадрокоптер своими руками → Из чего состоит квадрокоптер
Видеоподборки про RC моделизм → Квадрокоптер своими руками [Часть 2 — настройка APM и первый полёт]
Видеоподборки про RC моделизм → Дистанционный выключатель RC switch для моделей своими руками
Видеоподборки про RC моделизм → Квадрокоптер своими руками [Часть 3 — балансировка и полёты]
FPV для новичков, что нужно знать для полетов — Все о квадрокоптерах
 В этой статье я расскажу вам о том, с чего начать новичку в FPV полетах, дам несколько советов и упражнений, чтобы вы научились правильно и главное БЕЗОПАСНО летать на квадрокоптере или любой другой авиамодели.
В этой статье я расскажу вам о том, с чего начать новичку в FPV полетах, дам несколько советов и упражнений, чтобы вы научились правильно и главное БЕЗОПАСНО летать на квадрокоптере или любой другой авиамодели.
Есть специальные упражнения для новичков, которые помогут повысить навык владения квадрокоптером с управлением по FPV, а также простые правила безопасности, которые помогут уберечь вас и других от травм и других несчастных случаев.
Эта статья создана на основе моего личного опыта, поэтому, если вам есть что дополнить, пишите в комментариях и я это внесу в статью.
Правила безопасности
Прежде, чем начать статью, давайте уясним некоторые правила безопасного полета на квадрокоптере.
Обычно, квадрокоптер весит в среднем 500 грамм, чаще больше и вот представьте, что будет, если эти пол килограмма начнут падать, но у этого камня есть еще острые (скорее всего вращающиеся) лопасти. Будьте разумны и не делайте ничего опасного там, где могут быть люди.
- Узнайте о местных правилах полета, вдруг где-то рядом запрещенная и охраняемая территория, а если рядом аэропорт — летать около него СТРОГО запрещено!
- Не летайте один (одна), пусть по возможности рядом с вами будет наблюдающий человек, таким образом он сможет предупредить вас о какой-либо опасности, если вы этого не увидите через камеру в очках или шлеме или просто предупредит, что вы начали опасно сближаться с каким-нибудь объектом или полетели не туда, куда нужно.
- Найдите для тренировок и полетов большую и открытую площадку, где не будет людей, машин, частных и охраняемых территорий, особенно держитесь подальше от военных территорий (части, полигоны) и аэропортов.
Предпочтительнее поле с траво, чтобы при падении ничего не сломать квадрокоптеру или самолету. - Для полетов выбирайте сухую и безветренную погоду. Крупные дроны могут справляться с не сильным ветром, но для новичка противопоказан даже небольшой ветер.
Подготовка к полету
Перед полетом обязательно проверьте всю аппаратуру — пульт, приемник, камеру и видеопередатчик. Как то раз, я захотел полетать, вышел, включил пульт и дрон, взлетел, опустил шлем на глаза — а там нет видео! Пришлось экстренно выключать двигатели и дрон упал. Почему я выключил двигатели? Поднялся я всего метров на 6, а шлем почему-то опустил на глаза не сразу и не посмотрел, в какую сторону полетел дрон (выравниваюсь в полете, места много, летал тогда на заднем дворе частного дома), но этих 6 метров хватило, чтобы дрон залетел за часть дома. Там никого быть не должно было, так как все знают, что у меня время полетов и я принял решение отключить двигатели.
Не совершайте моей ошибки, у меня все обошлось, сломал только крепление от экшен-камеры. Всегда полностью проверяйте всю периферию.
Диагностика и проверка после полета
После полета тоже необходимо все проверять. Как только приземлились, сразу потрогайте двигатели и регуляторы, они все должны быть одинаковой температуры, теплые, но не горячие, палец должен терпеть тепло. Если какой-то горячий, скорее всего у него проблема с подшипником или магнитами (какой-то отклеился и трением нагревает корпус) или может выйти из строя регулятор оборотов.
Если двигатели горячие с левой стороны дрона (два правых, например), это означает, что неправильно распределен вес на раме и квадрокоптер это компенсирует повышенными оборотами.
Подробнее о том, как ремонтировать двигатели: https://profpv.ru/remont-beskollektornogo-dvigatelya/
Также, проверьте раму и двигатели на люфт, где-нибудь может открутиться болтик. Проверьте визуально плату и провода, все ли целое.
Что нужно знать перед тем, как начать летать
Понимание управляющих элементов пульта управления
Пульт управления (он же передатчик) очень похож на обычный джойстик для консолей и у него 2 основных элемента управления:
- Левый стик — газ и рыскание по оси
- Правый стик — тангаж вправо-влево и вперед-назад
Вот схема, чтобы вы поняли все наглядно:
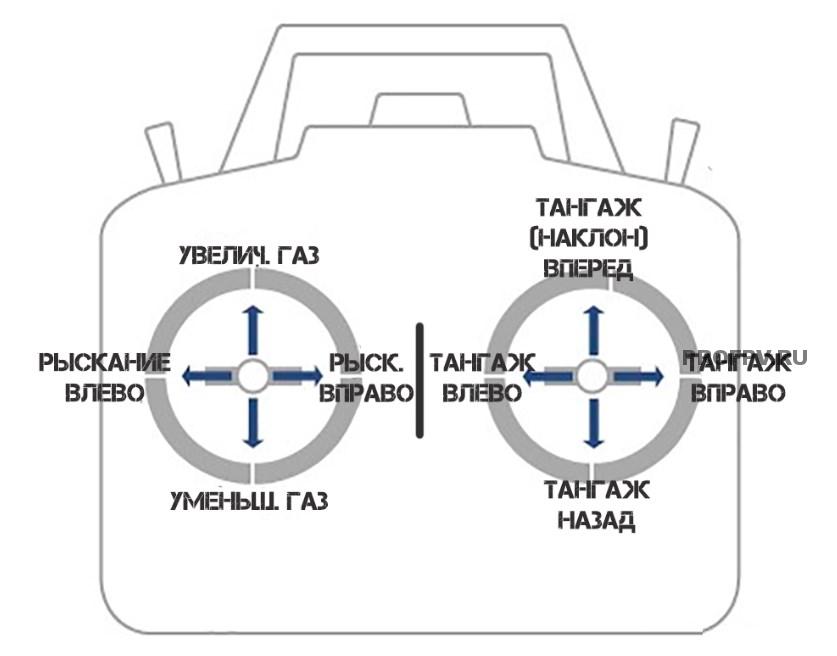 Схема элементов управления пульта и их значение
Схема элементов управления пульта и их значениеИ сразу англоязычная версия схемы:
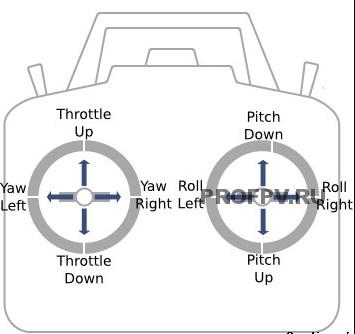
Подробнее о значениях — все значения имеют стандартные аббревиатуры на английском языке, я на нем их и приведу, но с расшифровкой:
- Throttle — это газ. Увеличиваем газ (поднимаем стик вверх) квадрокоптер полетит вверх, опускаем стик, газ уменьшается и квадрокоптер будет опускаться
- Yaw — вращение по оси, рыскание. Наклоняете левый стик влево — дрон начинает крутиться по оси влево и наоборот.
- Roll — элерон влево или вправо. На картинке не стал писать это слово, так вы запутаетесь, если, конечно вы не пилот авиации. Наклоняет квадрокоптер влево или вправо.
- Pitch — тангаж вперед или назад. Наклоняет дрон вперед или назад, чтобы он летел вперед или назад.
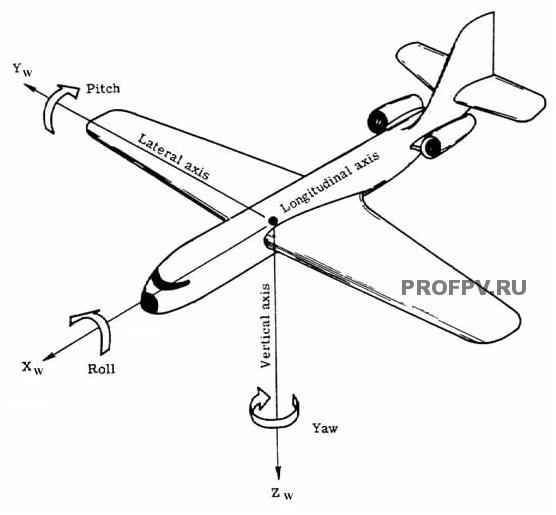
Вот как это выглядит на примере самолета:
На пультах есть обычно еще куча всяких тумблеров, но они программируются под конкретные задачи, например, для переключения режимов полета и так далее.
Режимы полета: режим стабилизации и АКРО режим
Новичкам всегда рекомендуется начинать летать в режиме стабилизации, это режим, в котором вам помогает управлять гироскоп, он не даст перевернуть дрон или сильно ему наклониться, и если вы отпустите правый стик, то квадрокоптер сам выравнит свое положение. В таком режиме дрон будет себя вести плавно и аккуратно, не будет никаких резких завалов и поворотов.
Более опытные пилоты летают в АКРО режиме. В таком режиме отключены все датчики стабилизации, т.е. если вы наклоните правым стиком дрон влево, а потом отпустите его, то он так и останется наклоненным влево.
Наглядно, чем они отличаются от автора одного из каналов Ютуба:
Расстояние
При полетах по FPV нужно привыкнуть к габаритам дрона и дистанции до объектов, так как по FPV это все воспринимается иначе. Это связано из-за линзы камеры, обычно она имеет эффект рыбьего глаза. Кажется, что объект еще далеко, а на самом деле он уже близко и наоборот. Поэтому в начале первых полетов летайте очень осторожно и медленно, вам нужно будет привыкнуть к ощущению расстояния и габаритам дрона.
Симуляторы полетов по FPV
Для первых тренировок рекомендую не менее 6 часов налетать в симуляторах квадрокоптера по FPV, их несколько, вроде как все платные, некоторые продаются в Steam. Хороши они тем, что там отлично передается физика полета и летаешь с помощью своего пульта от дрона. Подключаются пульты обычно с помощью специального штекера (продаются отдельно) в разъем микрофона. Для этого скачивается программа SmartPropoPlus, в ней вы выбираете разъем с подключенным пультом. Сворачиваете программу и запускаете симулятор, например, Liftoff.
Лучшие FPV симуляторы гоночного квадрокоптера: обзор, видео и ссылки
Как правильно держать стики пульта
Есть два мнения, как держать:


т.е. либо двумя пальцами, либо одним. Это дело каждого, держите так, как вам удобно, если посмотрите видео с соревнований профессионалов, они держат и первым способом и вторым. Я держу первым, одним пальцем, мне так удобно.
Настройка PID и Rate/Expo
Это достаточно важный момент, ПИДы настраиваются индивидуально и под каждого пилота, они у всех обычно разные. Настраивать их нужно для того, чтобы точно управлять дроном. Подробнее как настроить PID-регуляторы здесь: https://profpv.ru/chto-takoe-pid-na-chto-vliyaet-i-kak-nastroit/
ВЛП (Визуальная линия полета) и упражнения для полета
Прежде чем пуститься во все тяжкие по FPV, летайте на маленькие дистанции, то есть на таком расстоянии, чтобы при возникновении проблем с видео, вы могли снять очки/шлем и визуально контролировать квадрокоптер, это называется визуальная линия.
После тренировок в симуляторе FPV, лучше подержать квадркоптер в воздухе без очков, чтобы ощутить как он работает и ведет себя в воздухе, при этом наблюдая за ним визуально, а не через очки/шлем, подвигайтесь во все стороны (дроном), ощутите как он это делает.
В первых полетах даже не пытайтесь выполнить какие-то трюки, просто старайтесь держать квадрокоптер ровно, стабилизируйте его, чтобы он не прыгал и не скакал в 3 плоскостях, при этом не дезориентируя себя самого.
Я начинал учиться так: вместе с квадрокоптером смотрел в одну сторону, т.е. он камерой смотрит на север (условно) и я лицом смотрю на север, но стою позади него. Такой взлет и полет интуитивнее и проще, позволит вам сразу понять принцип работы управления. Не газуйте, стиками управляйте плавно.
Взлет и удерживание на высоте
Взлетите примерно на 1-2 метра над землей (плавно поднимайте стик газа) и постарайтесь удержать квадрокоптер в одной точке, очень плавно управляя стиками. Ниже полуметра пока не опускайтесь, так как будут завихрения воздушных потоков и дрон может откинуть в сторону. Просто удерживайте в одной точке на высоте 1-2 метра. Так вы получите первые навыки полета. И да, это нужно делать визуально, а как только научитесь спокойно держать, пробуйте удерживать по FPV.
Посадка и приземление
Многие ошибочно думают, что это легко. На самом деле это один из самых сложных моментов для новичка — посадить квадрокоптер так, чтобы ничего ему не отломать  В момент посадки нужно плавно регулировать подачу газа, не забывая о том, что перед самой землей начнутся завихрения воздушных потоков и квадрокоптер начнет кидать из стороны в сторону и это все нужно будет компенсировать подгазовыванием. С первого раза у вас конечно не получится плавно его посадить, но в дальнейшем это не составит труда. Любой опытный пилот посадит дрон без какого-либо стука о землю…ну или совсем чуть чуть.
В момент посадки нужно плавно регулировать подачу газа, не забывая о том, что перед самой землей начнутся завихрения воздушных потоков и квадрокоптер начнет кидать из стороны в сторону и это все нужно будет компенсировать подгазовыванием. С первого раза у вас конечно не получится плавно его посадить, но в дальнейшем это не составит труда. Любой опытный пилот посадит дрон без какого-либо стука о землю…ну или совсем чуть чуть.
Отрабатывание высоты и наклона
После отработки взлета, удерживания высоты и посадки, начните отрабатывать контроль набора высоты и наклоны вправо влево. Для этого выберите большую площадку без людей и животных и делайте цикл: подняться на 2 метра, пролететь метров 5 вперед, наклонить влево или вправо, при этом не теряя курс вперед и снова пролететь вперед. Затем наклоните квадрокоптер назад и повторите обратное. Таким упражнением вы отработаете навыки удержания и контроля высоты, а также наклоны для поворота.
Вращение (рыскание)
С помощью него квадрокоптер может вращаться на 360° по своей оси. Упражнение такое: вам нужно постараться облететь какой-либо объект (например себя) вокруг. Для этого используйте все навыки полученные из упражнений выше + вращение. Следите за газом, делайте все очень плавно (гонять будете немного позже).
Предотвращение крашей и поломок
Краш — это падение, столкновение. Чтобы минимизировать краши в начале вашего обучения, не взлетайте высоко, держите 2-3 метра высоты. Это связано с тем, что если вы поднимитесь слишком высоко (для вас высоко) то есть большая вероятность, что вы запаникуете от мысли, что начали терять управление и не понимаете куда летит квадрокоптер и вам придется его как то экстренно сажать, пока он не улетел далеко, а высота то большая, он упадет и сломает что-нибудь, главное, чтобы не кого-нибудь
Если у вас не получается летать
Не переживайте, вы бы знали, сколько было крашей у меня в первые полеты, но я учился в поле, падал на мягкую землю и ничего не сломал тогда. Сначала учился просто летать прямо, нарезал круги по полю, учился делать подъемы и снижения в полете, удерживание. Постепенно таким образом научился и потом стал нормально летать, сейчас у меня не супер навыки, но летаю довольно хорошо
Удачи вам в полетах, и не забывайте, безопасность для себя и других прежде всего, не летайте там, где люди!
Если вы нашли ошибку или ссылку, которая не работает, пожалуйста, выделите фрагмент текста и нажмите Ctrl+Enter.
Бюджетный шлем (очки) FPV для квадрокоптера
FPV («First Person View») — вид от первого лица. Полетав в компьютерном симуляторе на DJI Mavic Air, попробовав разные варианты управления коптером — со стороны, с экрана планшета, от первого лица, понимаешь: FPV — вещь! Самое удобное, как компьютерная игра 3D-стрелялка. При управлении коптером со стороны возникают ситуации, когда дрон полностью разворачивается: это сбивает ориентацию управления. При отлете на большую дистанцию тоже трудно управлять визуально — проще от первого лица. FPV Очки DJl Goggles стоят около 30 тыс. — дороговато, поэтому начал смотреть на другие варианты, и вот один из них — весьма интересное, на мой взгляд, устройство:

Реальные полеты по экрану смартфона, подключенному к пульту DJI Mavic Air, показали, что:
— размеров экрана не хватает;
— постоянные засветы экрана очень мешают: в яркий солнечный день всматриваешься в маленькую картинку до слез, пытаясь понять, куда улетел твой ненаглядный:)
Для меня квадрокоптер — летающая камера: надо видеть, что снимаешь. И желательно, чтобы картинка была большого размера. Первое, что я начал искать — как увеличить картинку. Нашел вот такой вариант увеличителя экрана — просто линза Френеля:

Но таскать пульт и всю эту приблуду с собой… Печально. Кроме того, от засветов она не спасает. Почему бы не взять VR-шлем за 20 долларов, не вставить в него смартфон и не использовать его как более дорогие FPV-очки? Разъем USB в нижней части пульта позволяет подключать любые кабели от телефонов и планшетов необходимой длины:

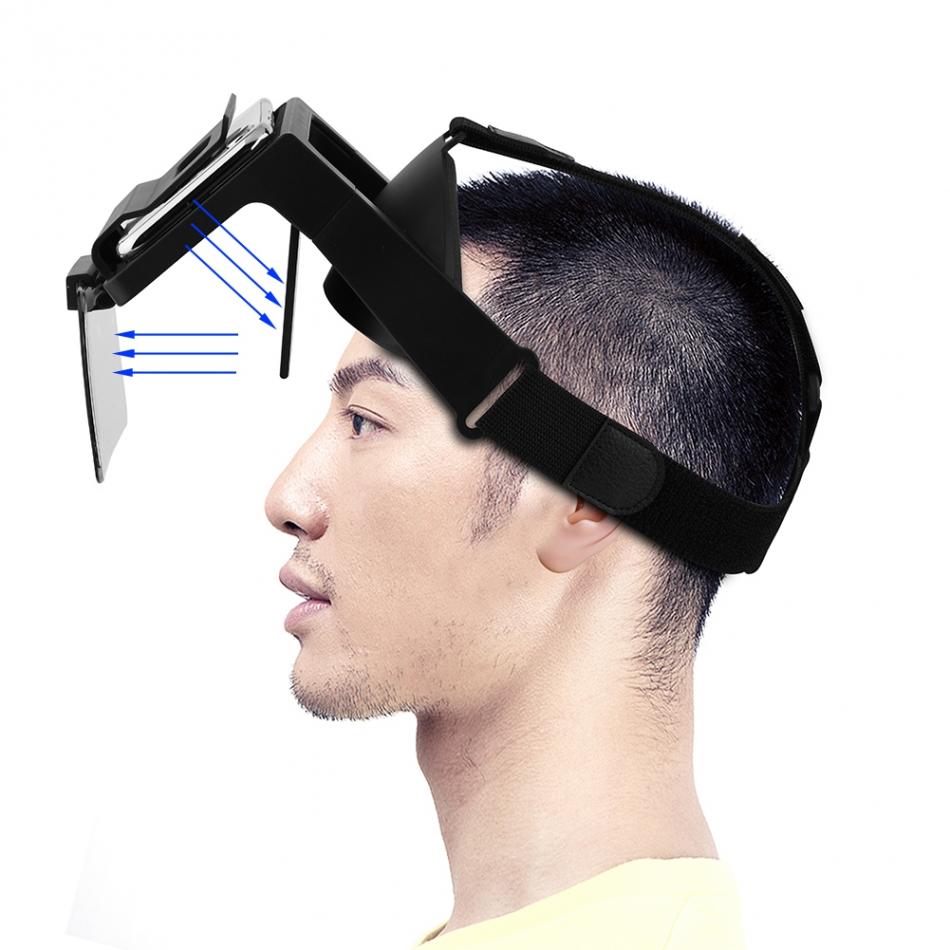
Для управления Mavic Air в VR-шлеме нужен отдельный софт — Litchi, Dream Flights. Кроме того, у таких шлемов изображение делится пополам, и на его обработку требуется больше мощности телефона. Но ведь мне и не нужно трехмерное изображение — достаточно просто увеличить экран, как в случае с линзой Френеля. Оказалось, существует вариант шлема-держателя для смартфона без VR — только крепление к голове и увеличение изображения. Принцип его работы можно понять по вот этой картинке:
Заказал, шлем-увеличитель пришел, смог попробовать это чудо сам:)
Система зеркал:

Верхняя рамка для смартфона — мой 6-дюймовый немного не влезает, но в описании было сказано, что до 5,5 дюймов:

Зеркало выпуклое, раза в два увеличивает, хотя в рекламе пишут про виртуальный экран в 50 дюймов:)

Полное название шлема Sovawin 3D Smartphone AR Augmented Reality glasses Mobile Box Headset Virtual Reality VR helmet Film AR Video Game with remote, но Solawin, как я понимаю, лишь собирал его из частей; самое технологичное в шлеме зеркало, на нем стоит метка Ximmerse:

Фирма Ximmerse делает подобные устройства, вот Ximmerse Phone Magnifier Screen 3D Screen Amplifier Smartphone Cell Phone Game Video Universal Holder Stand Lazy Bracket Visor X — здесь сказано про поддержку 6-дюймовых экранов и что виртуальный экран будет смотреться как 100 дюймов:)
Полет — да, гораздо лучше летать так! Но проблема засветов пока решилась наматыванием шарфа поверх:)

Необходимы защитные шоры по бокам — их явно не хватает. Еще одно фото Парка Победы в Санкт-Петербурге с DJI MAvic Air:

Кроме того, устройство позволяет просматривать фильмы с большим размером экрана — хоть в два раза, но и это уже немало. А еще можно мыть посуду, например, или лежать со смартфоном, не держа его в руках. Подумалось, что при подключении мыши и клавиатуры телефон с таким шлемом будет работать как полноценный ноутбук, тем более, что мой телефон проигрывает видео 4К лучше, чем стационарный компьютер и два ноутбука:)
Из минусов — отсутствие шор и то, что на затылке нет крепления, поэтому шлем сползает, задирая волосы вверх, а кожу на лбу — вниз. Лучше бы сделали полную маску.
Делаем FPV для квадрокоптера — rcboom.ru
Недавно я столкнулся с такой ситуацией, наверное, как и многие, когда мне захотелось видеть картинку того, что я снимаю с воздуха на моем, пока, любимом бюджетном квадрокоптере с GPS системой XK DETECT X380. На данный момент я расцениваю XK DETECT X380 как самый стабильный бюджетный квадрокоптер с GPS системой, требующий самые минимальные настройки перед полетом. Даже если подвес настроен корректно и с пульта управляется безотказно, но все же нужно учитывать, что это техника, которая иногда может давать сбои при работе и обидно будет, что в полете, к примеру, отказал подвес, а вы даже об этом и не знаете. Выход из такой ситуации — это создание FPV системы. FPV – это аббревиатура с английского First Person View, что означает в переводе «вид от первого лица». При помощи не хитрых приспособлений вы будете видеть на экране монитора, что снимает ваша видеокамера в полете. В моем арсенале уже была экшн-камера SJCAM sj5000x elite, 2-х осевой подвес Walkera G-2D, в качестве устройства принимающего видеосигнал я сделал выбор в пользу FPV маски Eachine EV800, ну и, собственно, сам квадрик. Мне оставалось докупить FPV передатчик и специальный провод для моей камеры, который передавал видеосигнал на FPV передатчик, а тот, в свою очередь, картинку на монитор. Передатчик я выбрал Eachine TX526 5.8G 40CH.


Почему именно этот передатчик, потому что, во-первых, очень легкий, весит всего 6,8гр., во-вторых, имеет переключаемую мощность 25MW/200MW/600MW, ну и в-третьих, он легко настраиваться.
Большинство FPV передатчиков, равно как и FPV маски с мониторами, поставляются со стандартными антеннами, так называемыми «сосиськами», у которых прием/передача сигнала хуже, чем у антенн по типу «клевер». Поэтому я приобрел еще 2 антенны по типу «клевер» для качественного сигнала.

Обратите внимание, что экшн-камера в обязательном порядке должна иметь видео выход, иначе нет смысла покупать передатчик. Видео выход обычно включается в настройках камеры.


Так же мною были закуплены коннекторы с разъемом JST.

Всем советую, всегда пригодится для всяких таких подключений.
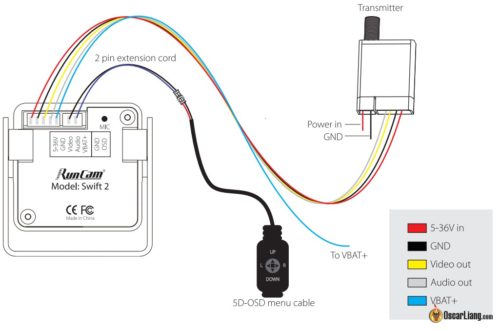
Получив Eachine TX526 и специальный FPV провод для моей камеры, я, как всегда, был в растерянности. Передо мной возник извечный вопрос: какие проводки к каким проводкам паять, чтоб все заработало. На фото представлены справа – провод для камеры, слева – провод, который идет в комплекте с FPV передатчиком.

Поискав информацию в интернете, я так ничего дельного не нашел. Ну и как всегда я начал экспериментировать по моему научному методу – метод научного тыка. И о чудо, все получилось и ничего не перегорело, и не сгорело.
Для начала я определил какие провода питают FPV передатчик, тут, в принципе, ничего сложного. Обычно в китайских проводах за это отвечают красный и черный провод.

они находятся рядом, нужно обратить внимание, что есть еще и второй черный провод. Затем я определил, согласно инструкции к передатчику, какие провода отвечают за видеосигнал в передатчике. Далее уже сложнее – определить какие провода к экшн камере отвечают за видео, которое должно передаваться с видеокамеры на передатчик. Экспериментальным путем я определил, что за это отвечают проводки с названием AV+ (белый) и В- (черный), соответственно, данные проводки подключаем к передатчику: AV+ (белый) к желтому на передатчике и В- (черный) к другому черному. Чтобы конструкция получилась мобильной, я припаял JST разъемы.

Далее, всю эту конструкцию

Подключаем к камере. Запитываем передатчик батареей, для проверки я взял аккумуляторную батарею от квадрокоптера Tarantula X6, так как напряжение у нее 7,4V – это минимальное рабочее напряжение для Eachine TX526, максимальное составляет 24V. Включаем камеру, в настройках выставляем TV out или что то похожее, связанное с телевизором. Затем берем монитор, в моем случае маска Eachine EV800, и включаем авто поиск видеоканала. Если авто поиск не дал результата, то смотрим какой канал на мониторе и на передатчике выставляем тот же канал и картинка должна появиться.
Если все работает, то всю эту конструкцию устанавливаем на квадрокоптер.



Все интересующие вас вопросы вы можете задать в нашей группе «Вконтакте».